Лекції. РОЗДІЛ 1. Механіка. частина 1.

Даний опорний конспект лекцій з предмету “Фізика і астрономія” є гранично стислим та спрощеним викладенням відповідного предмету, розрахованим на студентів конкретного фахового коледжу.
РОЗДІЛ 1. Механіка. частина 1.
Тема 1.1. Кінематика.
Лекційне заняття №1. Тема: Фізика – наука про Природу.
Основи математичної грамотності.
Тема 1.1. Кінематика.
Лекційне заняття №2. Тема: Механіка. Кінематика, основні поняття кінематики. Просторово часові характеристики поступального руху.
Лекційне заняття №3. Тема: Швидкість. Прискорення.
Лекційне заняття №4. Тема: Рівняння руху – основний закон кінематики. Практичне застосування рівняння руху.
Лекційне заняття №5. (Практичне заняття). Алгебраїчний та графічний методи розв’язування задач кінематики.
Лекційне заняття №6. Тема: Вільне падіння тіл. Рух тіла кинутого вертикально, горизонтально та під кутом до горизонту.
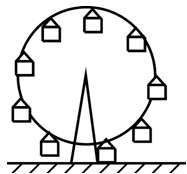
Лекційне заняття №7. Тема: Рівномірний рух по колу. Доцентрове прискорення. Період та частота обертання.
Тема 1.2. Статика.
Лекційне заняття №8. Тема: Статика. Сила. Додавання векторних величин.
Лекційне заняття №9. Тема: Умова механічної рівноваги тіла. Сила тяжіння. Реакція опори. Загальні відомості щодо розв’язування задач статики.
Лекційне заняття №10. Тема: Сила тертя. Силовий метод розв’язування задач статики.
Лекційне заняття №11. Тема: Сила інерції. Силовий метод розв’язування задач динаміки.
Лекційне заняття №12. Тема: Про вагу, невагомість, силу Архімеда.
Лекційне заняття №13. Тема: Закон всесвітнього тяжіння. Про силу гравітаційну та силу тяжіння. Механіка Сонячної системи.
Лекційне заняття №14. Тема: Механічні деформації. Сила пружності. Механічна напруга. Закон Гука.
.
Лекційне заняття №1. Тема: Фізика – наука про Природу.
Основи математичної грамотності.
Слово «фізика» в перекладі з грецької означає «природа». Фізика – наука про Природу. Більш вичерпного та більш ємного визначення для тієї сфери людської діяльності, яку прийнято називати фізикою, годі й шукати. Що ж означає слово «Природа»?
В науці, Природа – це не тільки дерева, звірі та чисте повітря. Не тільки навколишні пейзажі і зоряне небо. Природа – це щось значно більше, аніж просто навколишній світ. Значно більше за те, що ми здатні бачити і відчувати. Це навіть більше, аніж просто Всесвіт. Природа, це і далекі, неосяжно великі галактики і неймовірно малі атоми. Це наша душа, наші думки і наші почуття. Це наше минуле, теперішнє і майбутнє. Природа, це все що існувало, існує і буде існувати взагалі.
Мал.1. Природа – це безкінечний у своєму різноманітті та проявах Всесвіт.
Дати точне та вичерпне визначення терміну «Природа» практично неможливо. Адже не можливо осягнути неосяжне. Напевно найбільш вдалим та гранично вичерпним є наступне визначення. Природа – це безкінечний у своєму різноманітті та проявах Всесвіт, який представляє собою діалектичне поєднання матерії, руху, часу та простору, матеріального та духовного, минулого, теперішнього та майбутнього.
Сучасна наука виходить з того, що Природа, це єдиний цілісний організм, в якому все взаємопов’язано і взаємообумовлено. Що цей організм працює за певними правилами, які називаються законами природи. Що ці закони не можливо змінити, але їх можна пізнати, а пізнавши – застосувати на практиці. При цьому людина, будучи частиною Природи, на основі аналізу тих подій, які в ній (Природі) відбуваються, на основі аналізу спеціальних експериментів, вимірювань та досліджень, створила науку, яка називається фізикою – наукою про Природу. Іншими словами: Фізика – це наука, яка представляє собою об’єктивне відображення Природи в свідомості людини, викладене у вигляді певної системи достовірних знань.
Не буде перебільшенням сказати, що в системі наукових знань про Природу не було, нема і не буде більш важливої, значимої та всеосяжної навчальної дисципліни аніж фізика. Бо фізика, це і про Всесвіт, і про галактики, і про зірки, і про планети, і про життя, і про людину, і про клітину, і про молекули, і про атоми, і про елементарні частинки та поля, і про все різноманіття властивостей твердих, рідких та газоподібних речовин, і про все різноманіття існуючих та ще не існуючих машин, механізмів та приладів, і про теперішнє, минуле та майбутнє, і взагалі про все що було, є і буде. Бо вивчаючи фізику, ви по суті вивчаєте і хімію, і біологію, і географію, і астрономію, і технічну механіку, і електротехніку, і взагалі все різноманіття тих наук, які називаються природничими. І навпаки – вивчаючи все різноманіття природничих наук, ви фактично, вивчаєте певні фрагменти головної науки про Природу – фізики. При цьому лише в фізиці, всі ці фрагменти стають єдиним цілим і отримують своє узагальнено цілісне пояснення.
Ясно, що все різноманіття того, що вивчає і пояснює сучасна фізика, не можливо вивчити інакше як у вигляді певної системи знань. А основою цих знань є наукова теорія. Наукова (фізична) теорія – це система достовірних знань, яка на основі певних базових тверджень, кількісно описує і пояснює широке коло споріднених явищ. Саме теорія робить процес вивчення фізики свідомим та ефективним. Без теорії, тобто без цілісної системи знань, наука про Природу (фізика) неминуче перетворилась би на купу обособлених експериментальних фактів, розібратися в різноманітті яких було б практично не можливо. І не тому, що ці факти є надто складними, а тому, що їх надто багато. Виходячи з цього, ми будемо вивчати фізику не як певну сукупність окремих фактів, а як науку, в якій теорія займає провідне місце.
На теперішній час, в сучасній фізиці є дві базові теорії на основі яких можна пояснити практично все різноманіття відомих фізичних явищ. Цими теоріями є квантова механіка і теорія відносності. Але фізична і математична суть цих теорій стає зрозумілою лише після того, як пройдено певний еволюційний шлях інтелектуального розвитку і з’ясована суть тих, менш загальних теорій, які були історичними попередниками теорії відносності і квантової механіки. А це означає, що в межах загальноосвітньої школи, фізику вивчають і, напевно завжди будуть вивчати, як сукупність окремих розділів, в кожному з яких пояснюється певна група споріднених явищ. До числа таких розділів відносяться:
- Ньютонівська механіка;
- Молекулярна фізика;
- Термодинаміка;
- Електродинаміка;
- Оптика;
- Фізика атома і атомного ядра;
- Квантова механіка;
- Теорія відносності;
- Космологія.
Зважаючи на вище сказане, загальну структуру Природи, загальну структуру науки про Природу та ту роль, яку відіграє при цьому людина, можна представити у вигляді наступної схеми
Мал.2. Фізика – це об’єктивне і точне відображення Природи, викладене у вигляді певної системи знань.
Основи математичної грамотності.
Як не прикро але маємо визнати, що той навчальний предмет, вивчення якого починається ще в дитячому садочку і який називається «математика», на момент початку вивчення «фізики» не забезпечує належного рівня математичних знань учня. А фізика влаштована таким чином, що в ній учень постійно має справу як з надзвичайно великими так і надзвичайно малими числами. При цьому він повинен вміти записувати ці надвеликі та надмалі числа в зручному вигляді та вміти виконувати над ними базові математичні дії: додавання, віднімання, множення, ділення, піднесення в степінь, визначення кореня квадратного, тощо.
Наприклад маса Землі 5980 000 000 000 000 000 000 000 кг, а маса атома водню (гідрогену) 0,000 000 000 000 000 000 000 000 00166 кг. Ясно, що в подібних ситуаціях записувати відповідні числа в звичному для нас вигляді не зручно. Тому в фізиці та науковій практиці загалом, великі і малі числа зазвичай записують у так званому стандартному вигляді, тобто у вигляді певного малого числа помноженого на 10 у відповідній степені. Наприклад:
5 980 000 000 000 000 000 000 000 кг = 5,98·1024кг;
0,000 000 000 000 000 000 000 000 001 66 кг = 1,66·10–27кг.
На жаль практика показує, що учні 7-8-9, а часто густо навіть 10-х і 11-х класів мають дуже поверхові уявлення про представлення чисел в стандартному вигляді та про математичні дії над ними. Ще більш сумна ситуація з навичками трансформації математичних формул. А при розв’язуванні навіть найпростіших задач фізики ви повинні вміти певним чиним трансформувати (змінювати, перетворювати) відомі вам формули. Наприклад, якщо у відповідності з другим законом Ньютона a=F/m, то F=m·a; m=F/a. Якщо у відповідності з законом всесвітнього тяжіння F=Gm1m2/r2, то G=Fr2/m1m2; m1=Fr2/Gm2; r2=Gm1m2/F і тому r=√(Gm1m2/F).
Зважаючи на ці малоприємні факти, гранично стисло розглянемо дану, по суті математичну, тему. Тему, яку треба було б назвати «Математичний лікбез», що в буквальному перекладі означає «ліквідація математичної безграмотності».
- Представлення чисел в стандартному вигляді.
Оскільки: 103 = 10·10·10=1000; 105 = 10·10·10·10·10=100000 і т.д, то
4·105 = 400 000;
4,5·105 = 450 000;
28·104 = 280 000;
2,8·104 = 28 000.
І навпаки:
3 800 000 = 38·105 = 3,8·106;
125 000 000 = 125·106 = 12,5·107 = 1,25·108.
Оскільки: 10–3 = 1:103 = 1/1000 = 0,001 і т.д, то
4·10–3 = 0,004;
5·10–5 = 0,00005;
3,5·10–4 = 0,00035.
І навпаки:
0,0002 = 2·10–4;
0,0000075 = 7,5·10–6 = 75·10–7;
0,000125 = 1,25·10–4 = 12,5·10–5 = 125·10–6.
- Математичні дії над числами представленими в стандартному вигляді.
Оскільки: 105·103 = (10·10·10·10·10)·(10·10·10) = 105+3 = 108,
105·10–3 = (10·10·10·10·10):(10·10·10) = 105 –3 = 10–2
то в загальному випадку 10х·10у = 10х+у. Наприклад:
2·104·4·106 = 2·4·104+6 = 8·1010;
5·106·3·103 = 5·3·106+3 = 15·109;
7·108·5·10–4 = 7·5·108–4 = 35·104;
4,4·10–5·2·10–3 = 4,4·2·10–5–3 = 8,8·10–8.
Оскільки: 1/103 = 1/1000 = 0,001 = 1·10–3; 1/10–3 = 1/0,001 = 1·1000 =1·103, то в загальному випадку 1/10у = 10–у, а відповідно 10х/10у = 10х–у. Наприклад:
8·106/4·104 = (8:4)106–4 = 2·102;
12·105/3·10-4 = (12:3)105+4 = 4·109;
5·10–4/2·108 = (5:2)10–4–8 = 2,5·10–12;
15·103/3·108 = (15:3)103–8 = 5·10–5.
Оскільки (103)4 = (10·10·10)(10·10·10)(10·10·10)(10·10·10) = 103·4 = 1012, то в загальному випадку (10х)у = 10х·у. Наприклад:
(5·103)2 = 52·103·2 = 25·106;
(2·105)4 = 24·105·4 = 16·1020;
(4·10–3)2 = 42·10–3·2 = 16·10–6;
(3·10–4)3 = 33·10–4·3 = 27·10–12.
- Математичні дії над числами представленими у змішаному вигляді.
В науковій практиці загалом і в фізиці зокрема, виконуючи математичні дії над числами записаними в нестандартному або змішаному вигляді, ці числа спочатку представляють в стандартному вигляді, а вже потім виконують відповідні математичні дії. Наприклад:
500 000 · 0,003 = 5·105·3·10–3 = 5·3·105–3 = 15·102;
0,00025·2·104 = 2,5·10–4·2·104 = 2,5·2·10–4+4 = 5·100 = 5 (нагадаємо, будь яке число в нульовій степені дорівнює одиниці: а0 = 1);
12·104/0,0003 = 12·104/3·10–4 = (12:3)104+4 = 4·108;
400 000 + 3,5·105 + 0,65·106 = 4·105 + 3,5·105 + 6,5·105 = 105(4+3,5+6,5) = 14·105.
- Визначення квадратного кореня числа.
Квадратним коренем числа а (позначається √а, або (а)1/2) називають таке число х, квадрат якого дорівнює числу а. Іншими словами: якщо х2=а, то √а=х. Наприклад: √4=2; √9=3; √16=4; √25=5; √100=10; √2=1,41.
Можна довести: якщо мова йде про числа вигляду 10n, то √10n=10n/2. Наприклад: √102=10; √104=102; √108=104.
Можна довести, що √(а·b)=√а·√b. Наприклад: √(25·106)=√25√106=5·103.
- Математичні трансформації (перетворення) заданої формули.
В фізиці надзвичайно важливим вмінням, є вміння математично трансформувати (змінювати) задану формулу, а по суті, за заданою формулою визначати невідому величину. Загальне правило подібних трансформацій дуже просте: при переносі будь якої величини через знак дорівнює, пов’язана з цією величиною математична дія змінюється на протилежну: додавання змінюється на віднімання, віднімання змінюється на додавання, множення змінюється на ділення, а ділення змінюється на множення. При цьому відповідні величини переносять таким чином, щоб невідома величина (х) мала знак «+» та знаходилась в чисельнику. Наприклад:
якщо х + а = b то x = b – a, дійсно, якщо х + 3 = 8, то x = 8 – 3 = 5;
якщо х – а = b то x = b + a, дійсно, якщо х – 3 = 8, то x = 8 + 3 = 11;
якщо а – х = b то x = a – b, дійсно, якщо 10 – х = 4, то x = 10 – 4 = 6;
якщо a = b – x то x = b – a, дійсно, якщо 5 = 20 – x, то x = 20 – 5 = 15;
якщо a·x = b то x = b/a, дійсно, якщо 5·x = 10, то x = 10/5 = 2;
якщо a/x = b то x = а/b, дійсно, якщо 20/x = 5, то x = 20/5 = 4;
якщо а = b/x то x = b/a, дійсно, якщо 5 = 10/x, то x = 10/5 = 2;
якщо ax/bc = d то x = dbc/a, дійсно, якщо 2·x/3·4 = 6, то x = 6·3·4/2 = 36;
якщо ab/xc = d то x = ab/cd, дійсно, якщо 5·6/x·3 = 2, то x = 5·6/3·2 =5;
якщо (a + x)/b = c то a+x = cb звідси x = cb – a,
дійсно, якщо (4 + x)/5 = 2, то x = 2·5 – 4 = 6;
якщо a/(b – x) = c то b – x = a/c звідси x = b – a/c,
дійсно, якщо 20/(10 – x) = 5, то x = 10 – 20/5 = 10 – 4 = 6;
якщо I=U/R, то U=I·R;
якщо v=s/t, то s=v·t;
якщо S=πR2, то R=√(S/π);
якщо S=πd2/4 то d=√(4S/π).
Вправа №1.
- Задані числа представити у стандартному вигляді: 800000; 540000; 2540000; 0,000004; 0,00075; 0,00000128.
- Виконати математичні обчислення: 3·104·4·103; 6·10-5·3·104; 8·108·0,5·10–3; 2,8·10–4·2·10–3.
- Виконати математичні обчислення: 9·108/3·104; 45·10–3/5·105; 18·10–4/3·10–8; 3·106/2·10–4.
- Виконати математичні обчислення: (4·103)2; (2·10–4)4; (3·10–5)3; (8·106)2.
- Виконати математичні обчислення: 400000·3·105; 0,000025·2·10–5; 18·106/0,0006; 3,3·104 + 47000 – 50000.
- Визначити корінь квадратний: √49; √81; √106; √(36·104); √(9·104); √(2·1010).
- За заданою формулою визначити невідому величину (х): b – х=a; bx/c=a; (a+b)/x=c; a/(d+c)=d/x; b/(a–x)=c/d.
- За заданою формулою визначити невідому величину:
якщо I=U/R, то R=
якщо R=ρℓ/S, то ℓ=
якщо Q=I2Rℓ, то I=
якщо x = x0 + vt, то v=
якщо x = x0 + v0t + at2/2, то a=
.
Лекційне заняття №2. Тема: Механіка. Кінематика, основні поняття кінематики. Просторово часові параметри поступального руху.
Механіка (ньютонівська механіка) – це розділ фізики, в якому вивчають параметри, закономірності та причини механічного руху тіл в усіх його проявах, за умови, що швидкість цього руху значно менша за швидкість світла у вакуумі (300 000 км/с). Іншими словами, механіка – це наука про механічний рух.
Потрібно зауважити, що однією з різновидностей механічного руху є такий рух, швидкість якого дорівнює нулю (v=0). Цю різновидність руху називають механічним спокоєм. Крім цього, різновидністю механічного руху тіла є його механічна деформація, тобто та чи інша зміна форми (розмірів) тіла, що відбувається під дією певної сили. А це означає, що в механіці вивчають не лише параметри, закономірності та причини власне самого механічного руху (спокою) тіла, а й параметри, закономірності та причини всіх видів його механічної деформації.
Як правило, в механіці не вивчається глибинна суть тих процесів, результатом яких є механічний рух тіла. Наприклад, вивчаючи механіку, ми не будемо цікавитись тим, чому деформована пружина штовхає тіло? Чому повітряно-бензинова суміш в процесі згорання штовхає поршень двигуна? В чому причина появи сили тертя, сили опору повітря, сили пружності, сили тяги автомобіля, м’язової сили людини, тощо. В механіці просто констатується той факт, що причиною зміни швидкості руху тіла і причиною його пружної деформації є певна механічна дія на це тіло іншого фізичного об’єкту, і що мірою цієї дії є фізична величина, яка називається силою.
Ньютонівська механіка це надзвичайно великий розділ фізики базовими темами якого є кінематика, статика і динаміка.
Кінематика (від грецького «kinematos» – рух) – це розділ механіки, в якому вивчають параметри та закономірності механічного руху тіл, без врахування їх мас та діючих на них сил. Іншими словами, в кінематиці вивчають параметри та закономірності механічного руху і не вивчають причини цього руху, а також не враховують фізичні властивості рухомого тіла. До числа основних понять кінематики, тобто тих загальних слів (термінів) які є термінологічною основою кінематики і суть яких треба знати, відносяться: механічний рух, поступальний рух, обертальний рух, матеріальна точка, абсолютно тверде тіло, система відліку, траєкторія, відносність руху.
Механічний рух – це такий рух (процес), при якому тіло як єдине ціле, або певні цілісні фрагменти цього тіла, переміщується відносно інших тіл. Розрізняють дві прості різновидності механічного руху: рух поступальний та рух обертальний. Поступальний рух – це такий механічний рух, при якому будь-яка приналежна тілу пряма залишається паралельною сама собі. Наприклад, якщо книга рухається поверхнею стола таким чином, що будь яка з її бічних сторін залишається паралельними самі собі, то рух книги є поступальним. Він буде поступальним навіть тоді, коли книга не змінюватиме своєї кутової орієнтації, рухаючись по колу, або будь-якій іншій складній кривій. Якщо в процесі руху будь-яка приналежна тілу пряма залишається паралельною сама собі, то це тіло рухається поступально.
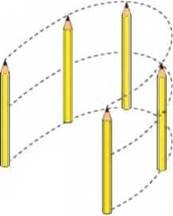
Мал.3. В процесі поступального руху тіла, будь-яка приналежна тілу пряма залишається паралельною сама собі.
Характерною та практично важливою особливістю поступального руху тіла є факт того, що при такому русі, всі точки тіла рухаються однаково. Однаково в тому сенсі, що мають однакові траєкторії руху, за однакові проміжки часу проходять однакові відстані, мають однакові миттєві і середні швидкості, однакові прискорення, тощо. А це означає, що описуючи поступальний рух тіла, нема потреби описувати рух кожної його окремої точки. Достатньо охарактеризувати рух будь-якої з цих точок, наприклад, центру маси тіла. Зважаючи на ці обставини, описуючи поступальний рух тіла, це тіло зазвичай замінюють його спрощеною (ідеалізованою) моделлю, яку прийняти називати матеріальною точкою.
Матеріальна точка, це така умовна точка, якою теоретично замінюють певне реальне тіло, в ситуаціях коли розмірами, формою та внутрішнім устроєм цього тіла можна знехтувати. Матеріальна точка зберігає лише одну механічну характеристику реального тіла – його масу. При цьому положення матеріальної точки практично завжди співпадає з положенням центру мас відповідного тіла. Представляючи реальне тіло у вигляді матеріальної точки, ми абстрагуємося від несуттєвих в умовах даної задачі характеристик тіла і зосереджуємо свою увагу на його суттєво важливих характеристиках. В кінематиці такими характеристиками є час руху, траєкторія руху, швидкість руху, прискорення, пройдений шлях, тощо.
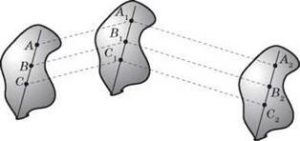
Обертальний рух – це такий механічний рух, при якому всі точки тіла описують кола, центри яких знаходяться на одній прямій, яка називається віссю обертання. Наприклад, обертально рухаються стрілка годинника, колесо автомобіля, двері класної кімнати, тощо. Звичайно за умови, що годинник «іде», колесо крутиться, двері відчиняються.

Мал.4. В процесі обертального руху тіла, всі його точки описують кола, центри яких знаходяться на одній прямій (осі обертання).
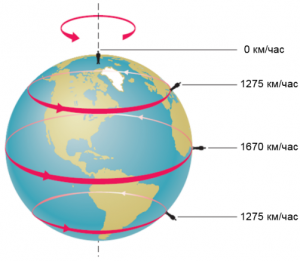
При обертальному русі різновіддалені від осі обертання точки тіла, рухаються суттєво по-різному: мають різні траєкторії руху, різні пройдені шляхи, різні лінійні швидкості, різні прискорення, тощо. А це означає, що обертальний рух тіла не можна описати, охарактеризувавши рух його однієї точки. Описуючи обертальний рух тіла, це тіло зазвичай представляють не у вигляді матеріальної точки, а у вигляді так званого абсолютно твердого тіла. Абсолютно тверде тіло, це таке умовне тіло, яким теоретично замінюють певне реальне тіло, в ситуаціях коли його механічними деформаціями можна знехтувати.
В загальному випадку механічний рух тіла представляє собою певну комбінацію поступального і обертального рухів. Наприклад, коли ви кидаєте камінь, або б’єте футбольного м’яча, то скоріш за все рухи цих тіл будуть поступально-обертальними. Або, наприклад, якщо автомобіль їде прямолінійною дорогою, то його корпус рухається поступально, колеса – поступально-обертально, а рух поршнів двигуна є певною комбінацією двох поступальних рухів. Якщо ж рельєф дороги складний, то всі ці руху стають набагато складнішими. Але яким би складним не був механічний рух тіла, його завжди можна представити як певну комбінацію двох простих рухів: поступального і обертального. А це означає, що вивчивши параметри та закономірності поступального і обертального руху можна описати та спрогнозувати будь-який найскладніший механічний рух.
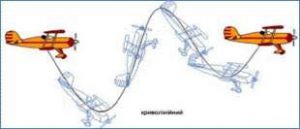
Мал.5. В загальному випадку рух тіла є поступально-обертальним.
Зважаючи на ці обставини та реалізуючи базовий методологічний принцип науки – від простого до складного, від часткового до загального, механіку загалом і кінематику зокрема, розділяють на дві частини механіка поступального руху (механіка матеріальної точки) та механіка обертального руху. І потрібно зауважити, що у відповідності з програмою загальноосвітньої школи, левову частину навчальних годин відведено вивченню механіки матеріальної точки, тобто механіки поступального руху.
Напевно ви чули про те, що будь-який механічний рух є відносним. Факт цієї відносності закарбовано в самому визначені механічного руху. Механічний рух, це такий рух при якому тіло переміщується відносно інших тіл. Автомобіль рухається відносно дороги. Поршень автомобільного двигуна рухається як відносно двигуна так і відносно тієї дороги якою їде автомобіль. Дорога разом з Землею рухається відносно Сонця, разом з Сонячною системою – відносно центру Галактики і т.д. При цьому рух поршня відносно двигуна автомобіля, суттєво відрізняється від руху того ж поршня відносно дороги.
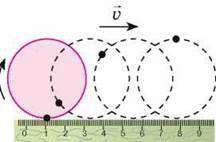
По суті, твердження про те, що механічний рух є відносним означає, що різні спостерігачі, спостерігаючи за рухом одного і того ж тіла можуть бачити суттєво різні рухи. Дійсно. Уявіть собі велосипед, який з певною постійною швидкістю рухається прямолінійною дорогою. Уявіть, що за певним елементом цього велосипеда, наприклад, за штуцером колеса (мал.6) спостерігають три спостерігачі. При цьому перший сидить на рамі велосипеда, другий – на землі, а третій – на самому колесі.
Кожен із спостерігачів дивиться на один і той же об’єкт (штуцер колеса) та описує його поведінку. Аналізуючи побачене, перший буде стверджувати, що штуцер рухається по колу. Другий, буде запевняти, що штуцер рухається певною кривою, яку прийнято називати циклоїдою. Третій же буде наполягати на тому, що штуцер не рухається. Не рухається тому, що розташування (положення) штуцера відносно елементів колеса велосипеда, а отже і відносно третього спостерігача, з плином часу залишається незмінним. І як це не дивно, але кожен з спостерігачів абсолютно правий. Адже відносно рами велосипеда штуцер дійсно рухається по колу, відносно дороги – по циклоїді, а відносно елементів колеса – не рухається взагалі.
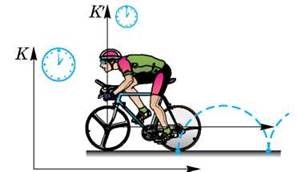
Мал.6. Різні спостерігачі, спостерігаючи за рухом одного і того ж об’єкту можуть бачити суттєво різні рухи.
Із вище сказаного ясно, що описуючи механічний рух тіла, необхідно чітко вказати, в якій системі відліку описується цей рух. Адже в різних системах відліку один і той же рух може виглядати по різному. Скажімо, якщо не вказати ту систему відліку в якій описується рух штуцера, то можна як завгодно довго та як завгодно запекло сперечатись стосовно того, як рухається штуцер – по колу, по циклоїді чи якось інакше. І кінця краю цій суперечці не буде.
Система відліку – це взаємопов’язана сукупність точки відліку, системи координат та вимірювача часу, яка застосовується для того, щоб кількісно описати механічний рух матеріальної точки (тіла) в цій системі. Система координат – це взаємопов’язана сукупність осей системи координат з вказаним на цих осях масштабом вимірювань. Точка відліку – це така умовно нерухома точка, яка є центром (нулевою точкою) відповідної системи координат. Задати систему координат означає: 1) вказати точку відліку даної системи; 2) задати просторову орієнтацію осей системи координат; 3) на кожній осі координат вказати масштаб вимірювань.
Розташування (місцезнаходження) матеріальної точки в заданій системі координат, однозначно визначається її координатами. При цьому, якщо мова йде про одновимірну (лінійну) систему координат (мал.7а), то в ній місцезнаходження матеріальної точки характеризується однією координатою М(х). В двовимірній (плоскій) системі координат (мал.7б), розташування точки характеризується двома координатами М(х;y), а в тривимірній (об’ємній, мал.7в) – трьома М(х;y;z).
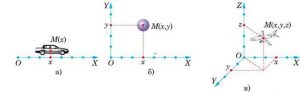
Мал.7. Системи відліку, це сукупність точки відліку, системи координат та вимірювача часу.
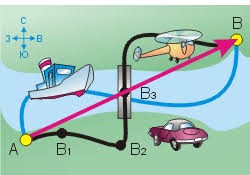
Лінію яку описує матеріальна точка в процесі свого руху в вибраній системі відліку називають траєкторією. В різних системах відліку траєкторія руху однієї і тієї ж матеріальної точки може бути суттєво різною. Наприклад, в системі відліку пов’язаною з землею, траєкторією руху велосипедного штуцера (мал.6) є сукупність послідовних циклоїд. В системі ж відліку пов’язаною з рамою велосипеда, цієї траєкторією буде сукупність співпадаючих кіл. А в системі відліку пов’язаній з колесом велосипеда – нерухома точка.
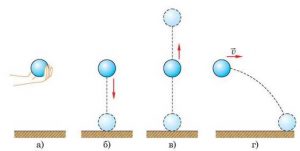
За формою траєкторії, механічні рухи поділяються на прямолінійні та криволінійні. Прямолінійним називають такий поступальний рух матеріальної точки, траєкторія якого представляє собою пряму лінію. Криволінійним називають такий поступальний рух матеріальної точки, траєкторія якого представляє собою криву лінію. Наприклад рух вертикально падаючого тіла (мал.8б) є прямолінійним, а рух тіла кинутого горизонтально (мал.8г) – криволінійним. Криволінійним є і рух тіла кинутого вертикально вгору (мал.8в). Його криволінійність полягає в тому, що відповідна траєкторія представляє собою ламану яка складається з двох прямолінійних відрізків.
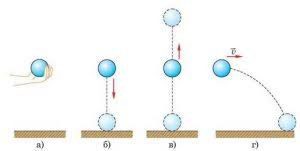
Мал.8. За формою траєкторії, поступальні рухи поділяються на прямолінійні (б) та криволінійні (в; г)
Та якою б криволінійною не була траєкторія руху тіла, її завжди можна представи ти як певну сукупність послідовних прямолінійних відрізків. А це означає, що вивчивши параметри та закономірності прямолінійного руху матеріальної точки, можна описати будь-який криволінійний рух. Виходячи з цього, вивченню параметрів та закономірностей прямолінійного руху ми будемо приділяти особливу увагу.
До числа основних фізичних величин кінематики поступального руху відносяться: час (t), координата (x), пройдений шлях (s) швидкість (v), прискорення (a).
Час – це фізична величина, яка характеризує тривалість подій (явищ, процесів, рухів, тощо) і яка дорівнює цій тривалості.
Позначається: t
Визначальне рівняння: нема
Одиниця вимірювання: [t] = с, (секунда)
Твердження про те, що час немає визначального рівняння по суті означає, що час належить до числа тих базових фізичних величин, одиниці вимірювання яких за домовленістю прийнято вважати основними. В механіці такими базовими величинами є час (t), довжина (ℓ) і маса (m).
Коли ми говоримо про координату матеріальної точки (тіла), то маємо на увазі певну величину, яка однозначно визначає місцезнаходження (положення) даної матеріальної точки в заданій системі координат. При цьому потрібно зауважити, що координата, це не просто число яке визначає положення матеріальної точки в вибраній системі координат. Координата, це відстань від точки відліку системи координат до даної точки, виміряній вздовж відповідної осі системи координат. Наприклад, в зображеній на мал.9а лінійній системі координат, автобус має координату (300), а вантажний автомобіль (–100). Це означає, що відносно точки відліку системи координат, автобус знаходиться на відстані 300м в додатному напрямку осі х, а автомобіль – на відстані 100м у від’ємному напрямку цієї осі. Або наприклад, в зображеній на мал.9б плоскій системі координат, трактор має координати А(300;100). Це означає, що для потрапляння в точку розташування трактора потрібно пройти 300м вздовж додатного напрямку осі 0Х, а потім пройти 100м вздовж додатного напрямку осі 0У.
а)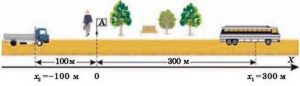 б)
б)
Мал.9. Координата точки дорівнює відстані від точки відліку системи координат до даної точки, виміряній вздовж відповідної осі системи координат.
Зважаючи на вище сказане можна дати наступне визначення.
Координата – це фізична величина, яка характеризує положення (місцезнаходження) матеріальної точки в заданій системі координат і яка дорівнює відстані від точки відліку цієї системи до проекції даної точки на відповідну вісь координат.
Позначається: х
Визначальне рівняння: х =ℓх
Одиниця вимірювання: [х] = м, (метр)
Оскільки координата, пройдений шлях, переміщення, висота, ширина, товщина, діаметр, радіус, периметр, діагональ, тощо, це різновидності тієї фізичної величини яка називається довжина, то буде не зайвим визначити і цю величину.
Довжина – це фізична величина, яка характеризує відстань між двома точками, виміряну вздовж певної лінії і яка дорівнює цій відстані.
Позначається: ℓ
Визначальне рівняння: нема
Одиниця вимірювання: [ℓ] = м, (метр).
Пройдений шлях – це фізична величина, яка характеризує пройдений матеріальною точкою (тілом) шлях і яка дорівнює довжині тієї траєкторії яку описує ця точка в процесі відповідного руху.
Позначається: s
Визначальне рівняння: s = ℓтр
Одиниця вимірювання: [s] = м, (метр).
Наприклад, в зображеній на мал.10 ситуації, бджола в процесі перельоту від однієї квітки до іншої, рухається певною криволінійною траєкторією. При цьому довжина цієї траєкторії і є тим пройденим шляхом який характеризує відповідний рух.
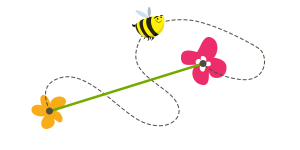
Мал.10. Пройдений шлях, це відстань між двома точками, виміряна вздовж траєкторії руху тіла (матеріальної точки.
Оскільки будь яку криволінійну траєкторію можна представити у вигляді певної сукупності прямолінійних відрізків, то вивчення параметрів та закономірностей криволінійного руху по суті зводиться до вивчення параметрів та закономірностей прямолінійного руху. А для такого руху рівняння s=ℓтр набуває вигляду s=∆х, де ∆х = хк – хп.
Нагадаємо. В науці загалом і в фізиці зокрема, символом ∆ – дельта (∆х, ∆t, ∆v, ∆m і т.д.) позначають різницю між кінцевим та початковим значенням відповідних величин: ∆х = хк – хп; ∆t = tк – tп; ∆v = vк – vп; ∆m = mк – mп і т.д.
Ілюструючи можливості та межі застосуванні формули s=∆х, розглянемо декілька простих ситуацій. Припустимо, що в заданій системі відліку точки А і В мають координати А(–300); В(200). Виходячи з цього, визначимо пройдений тілом шлях при його переміщенні: a) з точки А в точку В; б) з точки В в точку А; в) з точки А в точку В, а потім знову в точку А.
.
Із аналізу малюнка ясно, що при переміщенні А → В пройдений тілом шлях становить s1 = 500м, при переміщенні В → А: s2 = 500м, при переміщенні А → В → А: s3 = 500 + 500= 1000м.
Тепер, застосуємо формулу s = ∆х та отримаємо відповідні результати так би мовити теоретичним шляхом:
s1 = ∆x= хк – хп = (200) – (–300) = 500 м
s2 = ∆x= хк – хп = (–300) – (200) = –500 м
s3 = ∆x= хк – хп = (–300) – (–300) = 0 м
Не важко бачити, що останній результат явно суперечить реальному стану речей. Це пояснюється тим, що формула s=∆x є справедливою лише для прямолінійних ділянок руху. Рух же тіла за маршрутом А→В→А є криволінійним. І тому пройдений тілом шлях потрібно визначати не за формулою s=∆х, а за формулою s = ℓтр = |s1| + |s2| + … + |sN|, де N – кількість тих послідовних прямолінійних відрізків які утворюють відповідну криволінійну траєкторію. Наприклад, в умовах нашої задачі s = |s1| + |s2| = |500| + |–500| = 1000м
Таким чином, застосовуючи визначальне рівняння s=∆х потрібно пам’ятати, що воно є справедливим лише для прямолінійної ділянки руху. Втім, в котре наголошуємо, що будь-який криволінійний рух, завжди можна представити як певну сукупність прямолінійних відрізків.
Потрібно зауважити, що рівняння s=∆х не лише визначає величину пройденого тілом прямолінійного шляху, а й вказує на той напрямок в якому цей шлях пройдено. Наприклад, при переміщенні з точки А в точку В тіло рухається в додатному напрямку і тому s1= +500м. Коли ж тіло переміщується з точки В в точку А, то воно рухається у від’ємному напрямку і тому s2 =–500м.
Контрольні запитання.
- Який рух називають поступальним? Яка особливість цього руху?
- За яких умов рух тіла по колу буде поступальним. Чи є рух Землі навколо Сонця поступальним? Чому?
- Який рух називають обертальним? Чи можна описуючи обертальний рух тіла, представляти це тіло у вигляді матеріальної точки? Чому?
- Що називають матеріальною точкою? Які критерії є визначальними при з’ясуванні того, можна чи не можна дане тіло вважати матеріальною точкою?
- Що означає твердження: механічний рух є відносним? Наведіть приклади.
- Що означає задати систему координат? Чим система відліку відрізняється від системи координат? Яка з цих систем є більш загальною?
- Траєкторії руху двох тіл перетинаються. Чи означає це що тіла зіштовхуються? Поясніть.
- Дайте визначення термінам довжина, координата та пройдений шлях. Чим схожі та чим відрізняються ці величини?
- Чому довжина не має визначального рівняння?
- Що в науці позначають символом Δ (дельта): Δх; Δt; Δm; тощо?
- В яких випадках пройдений шлях визначають за формулою s=ℓтр, а в яких s=Δх?
Вправа 2.
- На основі аналізу малюнку визначити координати точок.
а)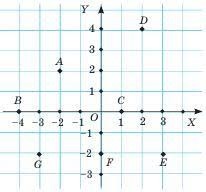 б)
б) 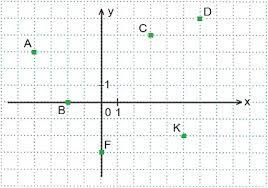
- Задайте плоску прямокутну систему координат і побудуйте в ній точки з координатами А(20, 20); В(-20, 40); С(20, 0); Д(10, –30); К(0, 20); М(–10, –20); N(0, 0); Р(30, –25).
- Задайте лінійну систему координат і побудуйте в ній точки з координатами: А(200); В(–150); С(50); Д(250); К(–50); М(0); N(100).
- На малюнку зображено план футбольного поля. Визначте координати кутових прапорців (А,В,С,Д), м’яча (М) і футболістів (Е,К, L, P,N) в системі відліку а) хоу; б) х′о′у′.
- Матеріальна точка переміщувалась за маршрутом А→В→С. Графічним методом визначте пройдений точкою шлях, якщо виражені в метрах координати точок: А(–30, 30), В(20, 20), С(–20, –20).
- Відстань між пунктами А і В по прямій лінії 4км. Людина проходить цю відстань туди і назад за 2 години. Чому дорівнює шлях і модуль переміщення людини за 1 годину? За 2 години?
- Мотоцикліст, рухаючись ареною цирку, проїжджає коло радіусу 13м за 8с. Визначте шлях і модуль переміщення мотоцикліста: а) за 4с руху; б) за 8с руху.
- У змаганнях з бігу беруть участь 4 учні швидкості яких відповідно дорівнюють 6м/с, 20км/год, 360м/хв, 0,35км/хв. Хто переможе і хто прибіжить останнім?
- Відстань від Землі до Сонця 150млн. км. Скільки часу потрібно променю світла, щоб подолати цю відстань? Швидкість світла 300 000км/с.
.
Лекційне заняття №3. Тема: Швидкість. Прискорення.
Нагадаємо, до числа основних фізичних величин кінематики поступального руху відносяться: час (t), координата (x=ℓх), пройдений шлях (s=∆х/∆t) швидкість (v), прискорення (a).
Швидкість – це фізична величина, яка характеризує швидкість поступального руху тіла (матеріальної точки), і яка дорівнює відношенню вектора того переміщення Δх яке здійснило тіло за гранично малий проміжок часу Δt, до величини цього проміжку часу.
Позначається: v
Визначальне рівняння: v=∆x/∆t
Одиниця вимірювання: [v] = м/с, (метр за секунду).
Якщо мова йде про прямолінійний рух, тобто такий рух в процесі якого напрям швидкості не змінюється, то рівняння v=∆x/∆t, набуває вигляду v=∆x/∆t. Різниця між цими рівняннями в тому, що перше (v=∆x/∆t) дозволяє визначати як величину так і напрям швидкості, а друге (v=∆x/∆t) – лише величину швидкості. Втім, якщо мова йде про прямолінійний рух, то в цьому випадку напрям швидкості є визначеним і таким, що співпадає з напрямком руху тіла. Оскільки в подальшому ми будемо говорити про прямолінійний рух матеріальної точки, то в якості визначального рівняння швидкості, будемо застосовувати формулу v=∆x/∆t.
Мал.11. Якщо за час Δt тіло (матеріальна точка) переміщується на відстань Δх, то швидкість цього тіла v=Δx/Δt.
Якщо ж мова йде про рівномірно-прямолінійний рух, тобто такий рух, швидкість якого не змінюється ні за величиною ні за напрямком, то в цьому випадку рівняння v=∆x/∆t набуває звичного для нас вигляду v=s/t Дійсно, для прямолінійно-рівномірного руху, визначальне рівняння пройденого шляху має вигляд s=Δx, а зважаючи на те, що той проміжок часу за який тіло проходить шлях s ми зазвичай позначаємо не Δt, а просто t (якщо tп=0, то Δt=tк–tп= tк=t) рівняння v=∆x/∆t набуває вигляду v=s/t.
Зазвичай, терміном швидкість позначають швидкість тіла в даний момент часу, тобто його миттєву швидкість. Але окрім миттєвої швидкості, існує багато різновидностей певним чином усереднених швидкостей: середня шляхова швидкість, середня швидкість переміщення, середня арифметична швидкість, середня квадратична швидкість, тощо.
В кінематиці поступального руху ми будемо говорити лише про одну різновидність усередненої швидкості – середню шляхову швидкість, яку будемо називати просто: середня швидкість. Наприклад коли ми говоримо, що з Києва до Чернігова автомобіль рухався з швидкістю 60км/год, то маємо на увазі середню шляхову швидкість цього руху. Адже в залежності від ситуації на дорозі, на певних ділянках руху автомобіль прискорювався, на певних – пригальмовував, на одних ділянках рухався швидше, на інших – повільніше, а на деяких – взагалі зупинявся. Тому швидкість 60км/год є тією усередненою швидкістю, яка дорівнює відношенню пройденого автомобілем загального шляху (s), до того загального проміжку часу (t) за який цей шлях було пройдено (vс= s/t).
Середня швидкість (середня шляхова швидкість) – це та усереднена швидкість з якою тіло долає певну ділянку шляху і яка дорівнює відношенню пройденого тілом загального шляху s, до того загального проміжку часу t, за який цей шлях пройдено.
Позначається: vс
Визначальне рівняння: vс= s/t
Одиниця вимірювання: [vс] = м/с, метр за секунду.
На відміну від швидкості тіла в даний момент часу (миттєвої швидкості), середня шляхова швидкість є величиною скалярною, тобто такою яка характеризується лише числовим значенням.
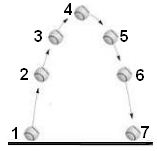
Задача 1. За представленим на малюнку графіком руху птаха, визначити його швидкість на кожній ділянці шляху, та середню швидкість на всьому шляху.
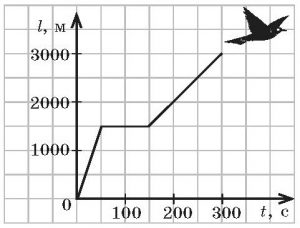
Рішення. На основі аналізу малюнку можна стверджувати, що рух птаха складається з трьох ділянок. При цьому:
Ділянка №1: t1 = Δt1 = 50c – 0c =50c; ℓ1 = Δx1 = 1500м – 0м = 1500м;
v1 = ℓ1/t1 = 1500м/50с = 30м/с.
Ділянка №2: t2 = Δt2 = 150c – 50c =100c; ℓ2 = Δx2 = 1500м – 1500м = 0м;
v1 = ℓ2/t2 = 0м/100с = 0м/с.
Ділянка №3: t3 = Δt3 = 300c – 150c =150c; ℓ3 = Δx3 = 3000м – 1500м = 1500м;
v3 = ℓ3/t3 = 1500м/150с = 10м/с.
Середня швидкість: vc = (ℓ1+ℓ2+ℓ3)/(t1+t2+t3) = 3000м/300с =10м/с.
Якщо швидкість тіла так чи інакше змінюється, то говорять що воно рухається з прискоренням. Прискорення – це фізична величина, яка характеризує зміну швидкості руху тіла, і яка дорівнює відношенню тієї зміни швидкості Δv, що відбулася за проміжок часу Δt, до величини цього проміжку часу.
Позначається: а
Визначальне рівняння: а=∆v/∆t,
Одиниця вимірювання: [a] = м/с2, метр за секунду в квадраті.
Оскільки швидкість, величина векторна, то вона може змінюватись як за величиною, так і за напрямком. Наприклад якщо рух тіла є прямолінійним, то його швидкість може змінюватись тільки за величиною (збільшуватись або зменшуватись). Якщо ж тіло рухається по колу, то його швидкість може змінюватись як за величиною так і за напрямком. При цьому, за напрямком вона змінюється обов’язково. Зважаючи на ці обставини, розрізняють дві різновидності прискорення:
1) Прискорення, яке характеризує зміну швидкості за величиною і яке визначається за формулою а=∆v/∆t, або а=(vк–v0)/t.
2) Прискорення, яке характеризує зміну швидкості за напрямком і яке визначається за формулою ад=v2/R. Це прискорення називають доцентровим і про нього ми поговоримо вивчаючи тему «Рух матеріальної точки по колу».
В подальшому терміном «прискорення» ми будемо позначати те прискорення яке характеризує зміну швидкості за величиною, і яке визначається за формулою а=(vк–v0)/t. Це прискорення завжди направлено вздовж лінії швидкості руху тіла. При цьому, якщо величина швидкості зростає (v↑), то вектори швидкості та прискорення співнаправлені, а якщо швидкість зменшується (v↓) – то ці напрямки протинаправлені. Наприклад, коли автомобіль рушає з місця (мал.12а), то його швидкість збільшується (v↑) і тому напрям того прискорення з яким рухається автомобіль, співпадає з напрямком його руху (з напрямком швидкості). Якщо ж автомобіль гальмує (мал.12б), то його швидкість зменшується (v↓) і тому напрям того прискорення з яким рухається автомобіль, протилежний до напрямку його руху (протилежний до напрямку швидкості руху автомобіля).

а)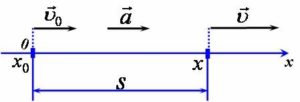 б)
б)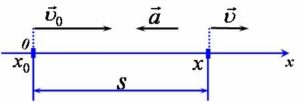
Мал.12. Якщо швидкість автомобіля збільшується (мал.а), то вектори a і v співнаправлені, а якщо зменшується (мал.б) – то протинаправлені.
Крім цього, потрібно мати на увазі, що коли рухаючись з постійним прискоренням (а=соnst), тіло збільшує свою швидкість, то відповідний рух називають рівноприскореним. При цьому говорять, що тіло має додатне прискорення (а>0). Якщо ж швидкість тіла зменшується, то відповідний рух називають рівносповільненим, а відповідне прискорення – від’ємним (а<0).
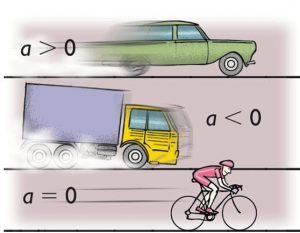
Мал.13. При рівноприскореному русі тіло має додатне прискорення (а>0), а при рівносповільненому русі – від’ємне (а<0).
Із визначального рівняння прискорення а=(vк–v0)/t, з усією очевидністю випливає, що при рівноприскореному русі (а=соnst) швидкість тіла можна визначити за формулою vк=v0+at або v=v0+at, де v0 – початкова швидкість тіла. Дійсно, оскільки а = (vк – v0)/t, то розкривши дужки отримаємо а = vk/t – v0/t. Звідси випливає vк/t=v0/t+а, або vк=v0+at. Зазвичай формулу v=v0+at називають рівнянням швидкості.
Таким чином, на практиці швидкість прямолінійного руху тіла визначають за формулами:
1) при рівномірному русі (v=const), v = s/t;
2) при рівноприскореному русі (а=const), v = v0+at.
Можна довести, що при рівноприскореному русі, між величиною прискорення тіла (а), його початковою (v0) і кінцевою (vк) швидкістю, та пройденим шляхом (s), існує співвідношення s=(vк2–v02)/2a. Формула s=(vк2–v02)/2a не входить до переліку базових формул кінематики, адже не є ані визначальним рівнянням певної фізичної величини, ані математичним формулюванням певного закону. Однак, зважаючи на загальність та практичну значимість цієї формули, її зазвичай застосовують як одну з базових формул кінематики. В подальшому достовірність формули s=(vк2–v02)/2a буде доведена, адже ця формула є похідною від основного кінематики – рівняння руху. На разі ж просто запам’ятайте s=(vк2–v02)/2a.
Задача 1. Автомобіль що рухається зі швидкістю 108км/год, в процесі гальмування зупинився через 10с. З яким прискоренням рухався автомобіль?
Дано: СІ
v0 = 108км/год 30м/с
vк = 0м/с –
t = 10с –
а = ?
Рішення: За визначенням а = (vк – v0)/t. В умовах нашої задачі а = (0м/с – 30м/с)/10с = –3м/с2, де знак «–» вказує на те, що рух автомобіля є рівносповільненим.
Відповідь: а = –3м/с2.
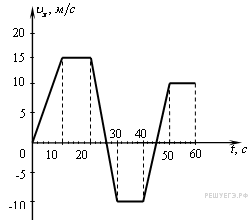
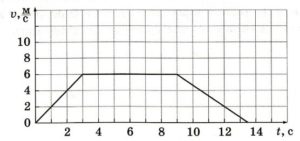
Задача 2. За заданим графіком швидкості руху тіла, визначити його прискорення на кожній ділянці шляху.
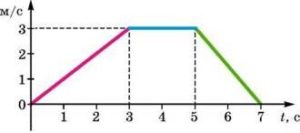
Рішення. На основі аналізу заданого графіку швидкості можна стверджувати, що даний рух складається з трьох ділянок. При цьому:
Ділянка №1: Δt1 = 3c – 0c = 3c; Δv1 = 3м/с – 0м/с = 3м/с;
а1 = Δv1/Δt1 = 3(м/с)/3с = 1м/с2;
рівняння швидкості: v1 = v0 + at = 0 + 1t = 1t
Ділянка №2: Δt2 = 5c – 3c = 2c; Δv2 = 3м/с – 3м/с = 0м/с;
а2 = Δv2/Δt2 = 0(м/с)/2с = 0м/с2;
рівняння швидкості: v2 = v0 + at = 3 + 0t = 3
Ділянка №3: Δt3 = 7c – 5c = 2c; Δv3 = 0м/с – 3м/с = –3м/с;
а3 = Δv3/Δt3 = –3(м/с)/2с = –1,5м/с2, де знак «–» вказує на те, що рух тіла є рівносповільненим (швидкість руху зменшується);
рівняння швидкості: v3 = v0 + at = 3 – 1,5t.
Задача 3. Автомобіль на ділянці шляху 50м розганяється до швидкості 72км/год. Який час розгону та яке прискорення автомобіля?
Дано:
s = 50м
v0 = 0м/с
vк = 72км/год = 20м/с
t = ? a = ?
Рішення: Виходячи з того, що s=(vк2–v02)/2a, можна записати а=(vк2–v02)/2s = [(20м/с)2 – (0м/с)2]/2·50м = 4м/с2. Оскільки за визначенням а = (vк – v0)/t, то t = (vк – v0)/a = (20м/с – 0м/с)/4м/с2 = 5с.
Відповідь: а = 4м/с2; t = 5c.
Зауваження. В рішенні задачі, ви повинні не лише записувати голі формули, а й робити відповідні письмові коментарі до них. Звичайно, ці коментарі мають бути максимально стислими, але такими, що чітко відображають логіку ваших міркувань. Наприклад: Виходячи з того, що …. та враховуючи, що…… можна записати ….Або: Оскільки … , то …
Контрольні запитання.
- Що означає твердження: «швидкість – величина векторна»?
- Чим відрізняється формула v=∆x/∆t від формули v=∆x/∆t?
- Чи суперечать формули v=∆x/∆t та v= s/t одна одній?
- Антилопа розвиває швидкість 25м/с, лев – 80км/год, а зебра – 1км/хв. У кого з них швидкість найбільша.
- Що характеризує прискорення? Чому розрізняють дві різновидності прискорення?
- Яка з формул а=∆v/∆t чи а=∆v/∆t є більш загальною? Чому?
- В якому випадку вектори швидкості і прискорення є співнаправленими, а в якому протинаправленими?
- Прискорення тіла дорівнює –2м/с2. Що це означає?
- Потяг відходить від станції. Як направлене його прискорення? Потяг починає гальмувати. Як направлене його прискорення?
- Рух ліфта можна розділити на три ділянки: 1) розгін, 2)рівномірний рух, 3) зупинка. Які напрямки швидкості і прискорення на кожній ділянці руху ліфта, якщо: а) ліфт рухається вгору; б) ліфт рухається вниз.
Вправа №3.
- Турист пройшов 5км за 1,5год, а потім ще 2км за 30хв. Яка середня швидкість туриста на всьому шляху?
- Автомобіль проїхав 72км зі швидкістю 20м/с, а потім ще 108км – за 3год. Яка середня швидкість автомобіля на всьому шляху?
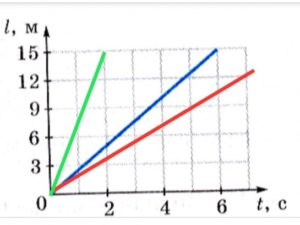
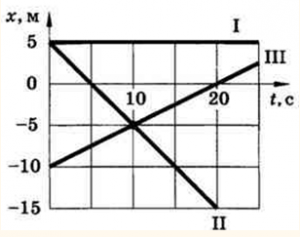
- За заданими графіками руху (червона, синя, зелена прямі), визначити відповідні швидкості руху.
- За представленим на малюнку графіком руху, визначити швидкість руху на кожній ділянці шляху, та середню швидкість на всьому шляху.
до задачі 3 до задачі 4
- За 5с швидкість тіла зросла з 2м/с до 6м/с. Визначити прискорення тіла.
- Яку швидкість матиме тіло через 20с від початку руху, якщо воно рухається з прискоренням 0,2 м/с2?
- Автобус рухаючись з прискоренням 2м/с2, зупинився через 3с. Визначити швидкість автобуса на початку гальмування.
- З яким прискоренням рухався автомобіль під час аварійного гальмування, якщо його швидкість перед гальмуванням становила 72км/год, а гальмівний шлях дорівнює 20м? Скільки часу пройшло до його зупинки?
- Куля, що летить зі швидкістю 300 м/с потрапляючи в земляний вал проникає в нього на глибину 36 см. З яким прискоренням і скільки часу рухалась куля в земляному валу?
- За заданим графіком швидкості руху тіла, визначити його прискорення на кожній ділянці руху. Запишіть рівняння швидкості для кожної ділянки руху.
.
Лекційне заняття №4. Тема: Рівняння руху – основний закон кінематики. Практичне застосування рівняння руху.
Нагадаємо, до числа основних фізичних величин кінематики поступального руху відносяться: час (t), координата (х=ℓх), пройдений шлях (s=∆x), швидкість (v=∆x/∆t) та прискорення (а=∆v/∆t). Якщо ж говорити про основний закон кінематики поступального руху, то він називається рівнянням руху. Рівняння руху – це закон, в якому стверджується: в загальному випадку, прямолінійний рух матеріальної точки можна описати рівнянням:
х = х0 + v0t + (а/2)t2
де х – координата матеріальної точки в момент часу t,
х0 – початкова координата точки, тобто її координата в момент часу t=0,
v0 – початкова швидкість матеріальної точки,
а – прискорення матеріальної точки.
Потрібно зауважити, що в рівнянні х=х0+v0t+(а/2)t2 арифметичний знак (плюс чи мінус) кожного доданку визначається із умов конкретної задачі. А це означає, що в загальному випадку рівняння руху має вигляд х=±х0 ±v0t±(а/2)t2.
Не буде перебільшенням сказати, що знаючи рівняння руху х=х0+v0t+(a/2)t2 та визначальні рівняння базових фізичних величин кінематики (s=∆x, v=∆x/∆t, а=∆v/∆t), можна розв’язати практично будь-яку задачу кінематики. У всякому разі ті задачі, складність яких не виходить за межі програми загальноосвітньої школи.
Втім, в фізиці не достатньо знати формули. В фізиці набагато важливіше бачити за цими формулами реальні події та їх параметри. Наприклад, в математиці рівняння х = 200 –10t + 0,2t2 це просто квадратне рівняння, яке в загальному випадку має два рішення і яке графічно можна представити у вигляді відповідної параболи. В фізиці, все те що вивчалося в математиці ви маєте знати та вміти застосовувати на практиці. Однак цього зовсім не достатньо для розв’язування задач фізики. Адже в фізиці за кожним рівнянням, за кожною цифрою, за кожною буквою та за кожним знаком, ви маєте бачити реальні події та їх характеристики.
Скажімо, просто поглянувши на рівняння х = 200 –10t + 0,2t2, та розуміючи що це рівняння руху, тобто рівняння вигляду х=х0+v0t+(а/2)t2, ви відразу ж уявляєте наступну ситуацію. В момент часу t=0, дане тіло знаходиться в точці з координатою 200м і рухається у від’ємному напрямку з швидкістю 10м/с. При цьому величина цієї швидкості зменшується (зменшується тому, що знаки (напрямки) швидкості та прискорення є протилежними), а числове значення прискорення становить 0,4м/с2. (Сподіваюсь, ви розумієте: якщо а/2=0,2 то а=0,2·2=0,4).
Таким чином, на основі порівняльного аналізу рівнянь
х = х0 + v0t + (а/2)t2,
х = 200 –10t + 0,2t2,
можна стверджувати:
х0= 200м; v0= –10м/с; а = 0,4м/с2; v↓
Загальні зауваження. Якщо в поясненнях до рівняння руху не вказані одиниці вимірювання відповідних величин, то потрібно вважати що цими одиницями є основні одиниці міжнародної системи (СІ): [x]=м; [v]=м/с; [a]=м/с2.
Задача 1. За заданим рівнянням руху дати загальну характеристику цього руху.
x1 = –200 +15t – 0,4t2: х0 = –200м; v0 = 15м/с; а = –0,8м/с2; v↓
x2 = 100 – 8t – 0,1t2: х0 = 100м; v0 = –8м/с; а = –0,2м/с2; v↑
х3 = 5 + 4t : х0 = 5м; v0 = 4м/с; а = 0м/с2; v = const
x4 = –5t: х0 = 0м; v0 = –5м/с; а = 0м/с2; v = const
x4 = 200 – 0,5t2: х0 = 200м; v0 = 0м/с; а = –1м/с2; v↑
x5 = –100: х0 = –100м; v0 = 0м/с; а = 0м/с2; не рухається
Зверніть увагу, ми просто дивимося на рівняння руху і отримуємо з нього достатньо велику кількість інформації. Тепер уявіть, скільки інформації можна отримати на основі математичного та логічного аналізу цього рівняння. Ілюструючи лише малу частину цих інформаційних можливостей, розглянемо конкретну задачу.
Задача 2. За заданим рівнянням руху х = 100 + 10t – 0,4t2:
1) дати загальну характеристику руху тіла;
2) визначити пройдений тілом шлях за десять секунд;
3) записати рівняння швидкості руху тіла та визначити цю швидкість через 10с;
- Визначити де і коли тіло зупиниться;
Відповідаючи на кожне з поставлених запитань можна сказати наступне.
- Дати загальну характеристику руху тіла: х0 =? v0=? а =? малюнок.
Із порівняльного аналізу рівнянь
х = х0 + v0t + (а/2)t2 та
х=100 +10t – 0,4t2, ясно:
х0 =100м; v0 = 10м/с; а = –0,8м/с2; v↓.
- Визначити пройдений тілом шлях за десять секунд: s(10)=?
Оскільки за визначенням s=∆х=хк –хп
та враховуючи що в умовах даної задачі
хп = х0 = 100м
хк = х(10) = 100 + 10(10) – 0,4(10)2 = 160м, можна записати
s(10)= х(10) – х0 = 160 – 100 = 60м.
- Записати рівняння швидкості руху тіла та визначити цю швидкість через 10с
Оскільки при рівноприскореному русі v=v0+at, то в умовах нашої задачі (v0=10м/с, а = –0,8м/с2) можна записати v=10 – 0,8t.
Якщо t=10c, то v(10)= 10 – 0,8(10) = 2м/с.
- Визначити, де і коли тіло зупиниться: хзуп =? tзуп=?
Оскільки в момент зупинки швидкість тіла дорівнює нулю (v=0), то можна записати: якщо t=tзуп, то v = 10 – 0,8tзуп = 0, звідси tзуп = 10/0,8=12,5c
А це означає, що хзуп =х(12,5)= 100+10(12,5) – 0,4(12,5)2 = 162,5м.
Потрібно зауважити, що в подібних задачах, пояснювальний малюнок, це не декоративний елемент, а активний учасник розв’язку задачі. Адже правильно виконаний малюнок не лише допомагає уявити наявну ситуацію, а й є елементом контролю правильності її рішення. Скажімо, якби в процесі розв’язку даної задачі, ви отримали відповідь хзуп= –50м, то на основі аналізу малюнку ви б зробили очевидний висновок: в процесі розв’язування задачі була зроблена якась помилка (поясніть чому?).
Потрібно зауважити, що рівняння руху дає формально-математичні відповіді на всі запитання які стосуються цього рівняння. При цьому ви маєте розуміти, що в реальності, у відповідності з певним рівнянням, тіло рухається певний обмежений проміжок часу. Скажімо в процесі руху, автомобіль на певних ділянках набирає швидкість, на певних пригальмовує, на певних їде з постійною швидкістю, а на певних робить ті чи інші маневри. При цьому кожна ділянка описується своїм рівнянням руху і має свої часові обмеження. Та якби там не було, а не важко бачити, що на основі аналізу рівняння руху, можна розв’язувати величезну кількість кінематичних задач. І відтепер ви розумієте, чому це рівняння називають основним законом кінематики.
Задача 3. В заданій системі відліку, рівняння руху тіл мають вигляд х1=15t, х2=200+10t. Де і коли зустрінуться ці тіла?
Дано:
х1=15t,
х2=100+10t
хзустр = ?
tзустр = ?
Рішення: На основі аналізу заданих рівнянь руху виконуємо відповідний малюнок (задаємо систему координат, на якій відображаємо наявну ситуацію).
Оскільки в момент зустрічі, тіла 1 і 2 мають знаходитись в одному і тому ж місці, тобто в точці однаковою координатою, то можна стверджувати, що для моменту часу t = tзустр має виконуватись умова х1 = х2. А це означає, що 15tзустр = 100 + 10tзустр , звідси 15tзустр – 10tзустр = 100, звідси 5tзустр = 100, звідси tзустр = 100/5 = 20с.
Таким чином, дані тіла зустрінуться через 20с в точці з координатою хзустр = х1(20) = 15(м/с)20с = 300м. Отриманий результат можна перевірити за допомогою другого рівняння: хзустр = х2(20) = 100м +10(м/с)20с = 300м.
Відповідь: tзустр = 20с, хзустр = 300м.
Задача 4. За заданим графіком руху, записати рівняння руху на кожній ділянці шляху (вважати, що вісь 0ℓ є віссю координати, тобто віссю 0х).
Загальні зауваження. Якщо графіком руху є пряма (відрізок прямої), то відповідний рух є рівномірним (v=v0=const), тобто рухом з нульовим прискоренням (а=0). А це означає, що рівняння такого руху має вигляд х=х0+vt.
Рішення. На основі аналізу заданого графіку руху можна стверджувати, що даний рух складається з трьох ділянок. При цьому:
Ділянка №1: х0=0м, хк=50м, Δх=50м, Δt=10c, v=Δx/Δt=50м/10c=5м/с,
рівняння руху х = 5t.
Ділянка №2: х0=50м, хк=50м, Δх=0м, Δt=15c, v=Δx/Δt =0м/15c =0м/с,
рівняння руху х= 50.
Ділянка №3: х0=50м, хк=150м, Δх=100м, Δt=10c, v=Δx/Δt =100м/10c=10м/с,
рівняння руху х = 50 + 10t.
Задача 5. Відходячи від станції, потяг протягом однієї хвилини рухається з прискоренням 0,4м/с2. Визначте той шлях який проїхав потяг за цей час, і швидкість наприкінці цього шляху.
Дано:
v0 = 0м/с
t = 1хв = 60с
a = 0,4м/с2
s = ? vк = ?
Рішення: Для пройденого шляху (s=х–х0) рівняння руху (х=х0+v0t+(а/2)t2) набуває вигляду s = v0t + (a/2)t2. А зважаючи що в умовах нашої задачі v0=0, можна записати s = (a/2)t2 = [(0,4м/с2)/2](60c)2 = 0,2(м/с2)3600с2=720м.
Оскільки при рівноприскореному русі vк=v0+at, то vк=0(м/с) + 0,4(м/с2)60с=24м/с.
Відповідь: s=720м; vк=24м/с.
Контрольні запитання.
- Як змінюється швидкість руху тіла (збільшується чи зменшується), якщо в рівнянні руху:
а) прискорення і швидкість мають знак «+»;
б) прискорення і швидкість мають знак «–»;
в) прискорення має знак «+», а швидкість – знак «–»;
г) прискорення має знак «–», а швидкість – знак «+»?
- Якого вигляду набуває рівняння руху для рівномірного руху (а=0)?
- Якого вигляду набуває рівняння руху в ситуації коли х0=0?
- Якого вигляду набуває рівняння руху в ситуації коли v0=0 ?
- Якого вигляду набуває рівняння руху в ситуації коли х0=0; v0=0 ?
- Виходячи з того що s = ∆х = х – х0, запишіть рівняння пройденого шляху.
Вправа 4.
- За рівнянням руху, дати загальну характеристику відповідного руху:
х1 = 100 + 10t + 0,5t2
х2 = –100 + 5t – 0,2t2
х3 = –10t – 0,3t2
х4 = 150 – 0,25t2
х5 = t2
- За заданим рівнянням руху х = 100 – 15t + 0,5t2:
1) дати загальну характеристику руху тіла;
2) визначити пройдений тілом шлях за 10с;
3) записати рівняння швидкості руху тіла;
4) визначити де і коли тіло зупиниться.
- За заданим рівнянням руху х = –200 + 12t – 0,3t2, визначити де і коли тіло зупиниться.
- В заданій системі відліку рівняння руху тіл мають вигляд х1=15t, х2=200+10t. Де і коли зустрінуться ці тіла?
- Із пунктів А і В одночасно та в одному і тому ж напрямку виїхав автомобіль з швидкістю 22м/с та велосипедист з швидкістю 8м/с. Де і коли вони зустрінуться, якщо відстань між пунктами А і В 900м?
- Із станції вийшов товарний потяг зі швидкістю 36км/год. Через 0,5год, в тому ж напрямку вийшов пасажирський потяг, швидкість якого 72км/год. Через який час і на якій відстані від станції пасажирський потяг наздожене товарний.
- За заданими на малюнку графіками запишіть відповідні рівняння руху.
- За заданим графіком швидкості руху тіла, визначити прискорення тіла на кожній ділянці шляху і записати відповідні рівняння швидкості та рівняння шляху.
.
Лекційне заняття №5. (Практичне заняття). Алгебраїчний та графічний методи розв’язування задач кінематики.
В фізиці є два базові методи розв’язування задач: алгебраїчний (аналітичний) та графічний (геометричний). Говорячи про сильні та слабкі сторони цих методів можна сказати наступне.
Суть алгебраїчного методу розв’язування задач полягає в тому, що виходячи з умов конкретної задачі та відомих базових формул, шляхом логічних міркувань (аналізу) та відповідних математичних перетворень, отримують алгебраїчне рішення задачі. Наприклад.
Задача.1. За заданими рівняннями руху х1=140 – 14t; х2= 4t, визначити де і коли тіла зустрінуться.
Рішення. Оскільки в момент зустрічі х1=х2, то можна записати 140 – 14t = 4t. Звідси 18t=140, звідси t=140/18=7,78с=tзустр. А це означає, що хзустр= х2(7,78)=4∙7,78=31,1м.
Відповідь: тіла зустрінуться через 7,78с в точці з координатою31,1м.
Суть графічного (геометричного) методу розв’язування задач полягає в тому, що на основі максимально точних геометричних побудов, з дотриманням вибраного масштабу та з застосуванням відповідних геометричних приладів (лінійка, транспортир, циркуль, тощо), отримують графічну відповідь на поставлене в задачі запитання. Наприклад.
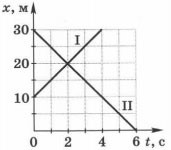
Задача 2. За рівняннями руху х1 =140 – 14t; х2 = 4t побудувати відповідні графіки та виконати їх кінематичний аналіз.
Рішення: На основі аналізу заданих рівнянь руху визначаємо координати базових точок:
х1=140 – 14t:
якщо t = 0с то х = 140м, А1(0; 140)
якщо t = 10с то х = 0м, А2(10; 0).
х2= 4t:
якщо t = 0с то х = 0м, В1(0; 0)
якщо t = 10с то х = 40м, В2(10; 40).
Задаємо систему координат і виконуємо необхідні геометричні побудови.
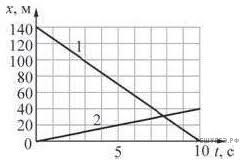
Побудувавши графіки заданих рухів та аналізуючи ці графіки, можна відповісти на безліч кінематичних запитань. Наприклад, визначити час та місце зустрічі тіл: зустрінуться приблизно через 7,8с в точці з координатою приблизно 30м. Можна встановити координати рухомих тіл в будь який момент часу. Скажімо, в момент часу t= 5с: х1≈50м; х2≈ 20м. Для будь якого моменту часу, визначити відстань між рухомими об’єктами. Наприклад: для t=5с, ℓ≈50м; для t=10с, ℓ=40м. Визначити швидкість тіла (v=∆x/∆t), його прискорення (a=∆v/∆t), напрям руху, тощо. Іншими словами, геометричний аналіз графіків руху, дозволяє відповісти на той же спектр запитань що і математичний аналіз відповідних рівнянь руху.
Головною перевагою графічного методу є його візуальна наочність. А основним недоліком – факт того, що точність графічного рішення залежить від точності геометричних побудов. Крім цього, графічне рішення задачі може бути ефективним лише в тому випадку, якщо досліджувані величини описуються лінійними функціями, тобто можуть бути представленими у вигляді певних прямих. Адже якщо наприклад, рівняння руху має вигляд х=40t–5t2, то графіком цього руху буде зображена на малюнку парабола для побудови якої потрібно визначити координати максимально великої кількості точок. Крім цього, за параболічним графіком важко визначити як величину тієї швидкості з якою рухається матеріальна точка в той чи інший момент часу, так і величину відповідного прискорення. Зважаючи на це, в подібних ситуаціях, графічний метод застосовується рідко.
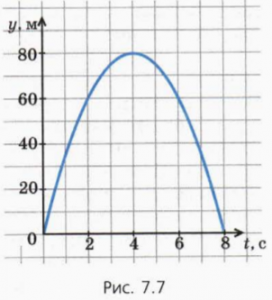
Мал.14. Графічний метод розв’язування задач є ефективним лише в тому випадку, коли відповідні графіки є лінійними.
Задача 3. З пунктів А і В відстань між якими 6км, одночасно і в одному напрямку вийшли два пішоходи з швидкостями відповідно 5км/год та 3км/год. Визначити де і коли вони зустрінуться.
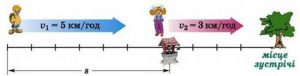
Дано:
s = 6км
v1 = 5км/год
v2 = 3км/год
xзустр=?
tзустр=?
Рішення: На основі аналізу умови задачі виконуємо відповідний малюнок, тобто задаємо систему координат на якій відображаємо наявну ситуацію. У відповідності з малюнком та заданою системою координат, записуємо рівняння руху кожного пішохода: х1 = 5t; х2 = 6 + 3t. Оскільки в момент зустрічі х1 = х2, то 5tзустр= 6 + 3tзустр. Звідси випливає, що 5tзустр – 3tзустр = 6, або tзустр(5 – 3) = 6, або tзустр= 6/2 =3год. Таким чином: хзустр= х1(3)=5·3= 15км.
Відповідь: tзустр=3год, хзустр= 15км.
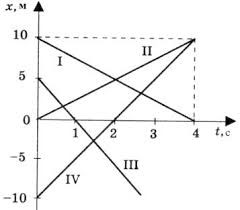
Задача 4. За заданим графіком руху матеріальної точки визначити її швидкість на кожній ділянці шляху та записати відповідне рівняння руху.
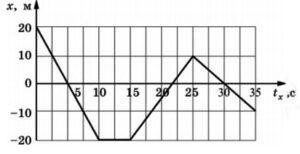
Рішення. Оскільки на кожній ділянці графік руху представляє певну пряму, то відповідні рухи є рівномірними (v=const). А це означає, що швидкість такого руху визначається за формулою v=Δх/Δt. Тому, на основі кількісного аналізу графіку можна записати:
1) ділянка 1: Δt = 10c, х0 = 20м, Δx = –40м, v1=Δx/Δt= –20м/10с= –4м/с, отже x1 =20 – 4t;
2) ділянка 2: Δt = 5c, х0 = –20м, Δx = 0м, v2=Δx/Δt= 0м/5с = 0м/с, отже x2 = – 20;
3) ділянка 3: Δt = 10c, х0 = – 20м, Δx = 30м, v3=Δx/Δt= 30м/10с= 3м/с, отже x3 = –20 + 4t;
4) ділянка 4: Δt = 10c, х0 = 10м, Δx = –20м, v4=Δx/Δt= –20м/10с= –2м/с, отже x4 = 10 –2t;
Задача 5. За заданим графіком руху, визначити швидкість руху тіла на кожній ділянці. Побудувати графік швидкості руху тіла.

Рішення. Оскільки на кожній ділянці графік руху представляє певну пряму, то відповідні рухи є рівномірними (v=const). А це означає, що швидкість такого руху визначається за формулою v=Δℓ/Δt. Тому, на основі кількісного аналізу графіку можна записати
v1=Δℓ1/Δt1=50м/5с=10м/с;
v2=Δℓ2/Δt2=25м/5с=5м/с.
Отримані результати представляємо у вигляді відповідного графіка швидкості.
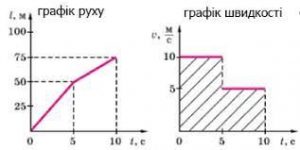
Загальні зауваження. Аналіз графіку швидкості руху тіла дозволяє графічним способом визначати величину пройденого шляху як на певній ділянці руху так і на будь якій сукупності цих ділянок. А величина цього шляху дорівнює площі тієї фігури, яка з одного боку обмежена графіком швидкості та віссю 0–t, а з іншого – тими вертикальними лініями, які відповідають тому проміжку часу в межах якого визначається пройдений шлях. Наприклад в умовах нашої задачі s = (10м/с∙5c) + (5м/с∙5c) = 50м +25м = 75м.
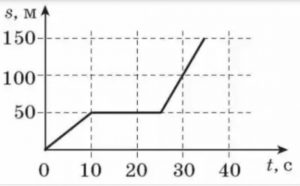
Задача 6. За заданим графіком швидкості, описати рух тіла на кожній ділянці шляху. Визначити пройдений тілом шлях на кожній ділянці.
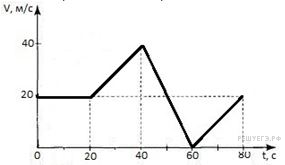
Оскільки задані рівняння швидкостей представляють собою певні прямі, то можна стверджувати, що відповідні рухи є рівноприскореними (а=соnst), тобто такими, які описуються формулами:
v = v0 + at – рівняння швидкості;
s = v0t + at2/2 – рівняння пройденого шляху;
для криволінійного руху: s = |s1| + |s2| + …
Кількісно аналізуючи графік швидкості на кожній ділянці, можна сказати наступне:
1. Ділянка №1: ∆t=20c; v=20м/c=const; a=0; отже s=vΔt=20(м/с)∙20с=400м
2. Ділянка №2: ∆t=20c; v≠const; v0=20м/c; a=∆v/∆t=(20м/с)/20с=1м/с2; отже s = v0Δt + aΔt2/2 = 20(м/с)∙20с + 0,5(м/с2)∙(20с)2 = 600м.
3. Ділянка №3: ∆t=20c; v≠const; v0=40м/c; a=∆v/∆t=(–40м/с)/20с= –2м/с2; отже s = v0Δt + aΔt2/2 = 40∙20 –1∙202 = 400м.
4. Ділянка №4: ∆t=20c; v≠const; v0=0м/c; a=∆v/∆t=(20м/с)/20с=1м/с2;
s = v0Δt + aΔt2/2 = 0∙20 + 0,5∙202 = 200м.
Задача 7. Відходячи від станції, потяг протягом однієї хвилини рухається з прискоренням 0,4м/с2. Визначте той шлях який проїхав потяг за цей час, і швидкість наприкінці цього шляху.
Дано:
v0 = 0м/с
t = 1хв = 60с
a = 0,4м/с2
s = ? vк = ?
Рішення: Оскільки при рівноприскореному русі Оскільки при рівноприскореному русі s = v0t + at2/2, та зважаючи що v0=0, можна записати s =(a/2)t2=[(0,4м/с2)/2](60c)2= 0,2(м/с2)3600с2=720м.
Оскільки при рівноприскореному русі vк=v0+at, то vк=0(м/с) + 0,4(м/с2)60с=24м/с.
Відповідь: s=720м; vк=24м/с.
Вправа №5.
- Рух тіл вздовж осі ох задано рівняннями х1=5t, х2=150 – 10t. Визначити де і коли тіла зустрінуться. Задачу розв’язати алгебраїчно і графічно.
- З пунктів 1 і 2 відстань між якими 9км, одночасно і в одному напрямку вийшли мотоцикліст та велосипедист з швидкостями відповідно 20м/с та 18км/год. Визначити де і коли вони зустрінуться.
- Рушаючи з місця, автомобіль протягом 10с рухається з прискоренням 2м/с2. Яку швидкість встигає набрати автомобіль? Який шлях проходить при цьому?
- 4. За заданими графіками руху записати відповідні рівняння руху. Визначити час та місце зустрічі тіл. Задачу розв’язати алгебраїчно і графічно.
- За заданими графіками руху записати відповідні рівняння руху.
6. За заданим графікам швидкості визначити прискорення тіла на кожній ділянці шляху, записати відповідні рівняння швидкості та рівняння пройденого шляху.
- За заданими графіками швидкості руху матеріальної точки визначити її прискорення на кожній ділянці шляху, записати відповідні рівняння швидкості, визначити величину пройденого шляху на кожній ділянці.
а)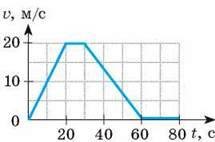 б)
б) 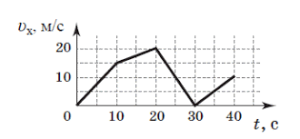
- За заданим графіком визначити пройдені тілом шляхи на кожній ділянці руху та на всьому шляху. Задачу розв’язати геометричним та алгебраїчним методом.

.
Лекційне заняття №6. Тема: Вільне падіння тіл. Рух тіла кинутого вертикально, горизонтально та під кутом до горизонту.
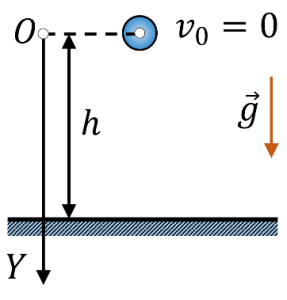
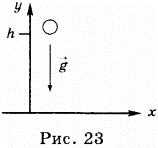
Вільним падінням називають такий рух тіла, який відбувається під дією сили тяжіння та за відсутності суттєвого впливу інших зовнішніх сил, зокрема сили опору повітря. В загальному випадку вільно падаючими вважають не лише ті тіла падіння яких починається з нулевою швидкістю (мал.15а), а й ті які з певною швидкістю кинули вертикально вниз, вертикально вгору, горизонтально або під кутом до горизонту (мал.15б,в,г,д). Адже в кожному з цих випадків, тіло після отримання певного початкового поштовху, рухається під дією лише однієї зовнішньої сили – сили тяжіння (звичайно за умови, що сила опору повітря є не суттєвою).
Мал.15. Рух тіла що відбувається під дією сили тяжіння та за відносності дії інших зовнішніх сил (зокрема суттєвого впливу опору повітря), називають вільним падінням тіла.
Характерною особливістю того руху який називається вільним падінням є те, що це падіння відбувається з певним постійним як за величиною так і за напрямком прискоренням, яке називається прискоренням сили тяжіння або прискоренням вільного падіння. Напрям прискорення вільного падіння співпадає з напрямком діючої на тіло сили тяжіння, тобто є направленим вертикально вниз.

Мал.16. Під дією сили тяжіння та за відсутності суттєвого впливу опору повітря, всі тіла падають з однаковим прискоренням – прискоренням вільного падіння (експериментальний факт).
Підкреслюючи важливість та значимість прискорення вільного падіння (прискорення сили тяжіння), його позначають окремою літерою g (від лат. gravitas – тяжіння). Для Землі, усереднена величина цього прискорення становить g=9,8067 м/с2. Зазвичай числове значення прискорення вільного падіння приймають рівним g=9,8м/с2. Однак зважаючи на те, що числове рішення переважної більшості задач на вільне падіння тіл є досить приблизним (приблизним бодай тому, що не враховує силу опору повітря), при наближених розрахунках величину прискорення вільного падіння часто округлюють до g=10м/с2.
Потрібно зауважити, що величина та напрям прискорення вільного падіння не залежать від того в якому напрямку рухається тіло і з якою початковою швидкістю воно рухається. Наприклад, в незалежності від того чи вільно відпустили піднятий над землею камінь (мал17а), чи з певною швидкістю кинули вертикально вниз (мал.17б), вгору (мал.17в) чи під кутом до горизонту (мал.17г), цей камінь буде рухатись з прискоренням g=9,8м/с2. В незалежності від того рухається камінь вгору чи падає вниз, він рухається з прискоренням g=9,8м/с2 і це прискорення завжди направлено вертикально вниз. Навіть в точці максимального підйому тіла, де його швидкість дорівнює нулю, тіло має прискорення g=9,8м/с2. Іншими словами, на всій траєкторії вільного польоту, тіло рухається з прискоренням вільного падіння.
Мал.17. У всіх точках траєкторії вільного польоту, тіло рухається з прискоренням вільного падіння (g=9,8м/с2)
Як і будь-який рівноприскорений рух, вільне падіння тіла можна описати рівнянням виду х=х0+v0t+(a/2)t2. Відмінність лише в тому, що говорячи про вільне падіння матеріальної точки, її вертикальну координату (висоту) зазвичай позначають літерою h, а прискорення – літерою g. Іншими словами, рух вільно падаючого тіла можна описати формулою h=h0+v0t+(g/2)t2.
Ілюструючи закономірності того руху який називається вільним падінням тіла, а заодно ілюструючи практичну значимість того закону який називається рівнянням руху, розв’яжемо ряд конкретних задач.
Задача 1. Визначити глибину колодязя, якщо відомо, що випущений із руки камінь досягає води за 2с.
Дано :
v0 = 0 м/с
t = 2 с
h = ?
Рішення: Виконуємо малюнок, задаємо систему координат та записуємо рівняння руху тіла в цій системі, тобто формулу яка має вигляд h=h0+v0t+(g/2)t2. В умовах даної задачі h0=0м; v0=0м/с, це рівняння набуває вигляду: h=(g/2)t2, де g=10м/с2. Враховуючи, що t=2c, виконуємо відповідні розрахунки.
Розрахунки: h=(10(м/с2)(2с)2/2=20м;
Відповідь: h=20м.
Загальні зауваження. Конкретний вигляд рівняння руху, визначально залежить від того, як задана система координат. Наприклад, якщо в даній задачі за початок відліку взяти рівень дна колодязя, а вісь 0у направити вертикально вгору, то в цьому випадку рівняння руху h=h0+v0t+(g/2)t2 набуде вигляду h=h0 – (g/2)t2. Втім, рішення задачі та її відповідь, в обох випадках буде однаковим. Дійсно, в момент падіння тіла h=0, тому h0 – (g/2)t2 = 0, звідси h0 = (g/2)t2 = 20м.
h=(g/2)t2 = 5t2, де h=?
якщо t=2c, то h=5t2=20м
h=h0 – (g/2)t2 = 10 – 5t2, де h0=?
якщо t=2c, то h=0м, тому h0=5t2=20м.
Задача 2. Тіло вільно падає з висоти 45м. Визначте час падіння тіла.
Дано:
h = 45м
tпад= ?
Рішення: Виконуємо малюнок, задаємо систему координат та записуємо відповідне рівняння руху тіла, тобто формулу яка має вигляд h=h0+v0t+(g/2)t2. В умовах даної задачі (h0=0м; v0=0м/с), це рівняння набуває вигляду: h=(g/2)t2. Звідси випливає t2 = 2h/g, звідси t = √(2h/g).
Розрахунки: t = √(2·45м/10(м/с2))= √(9с2) = 3с
Відповідь: tпад= 3с.
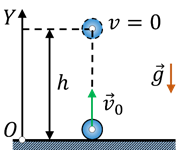
Задача 3. На яку максимальну висоту підніметься тіло. Якщо його кинули вертикально вгору з швидкістю 20м/с?
Дано :
v0 = 20 м/с
hmax = ?
Рішення: Виконуємо малюнок, задаємо систему координат та записуємо відповідне рівняння руху тіла, тобто формулу яка має вигляд h=h0+v0t+(g/2)t2. А оскільки в умовах даної задачі h0=0м; g=10м/с2, то рівняння руху набуває вигляду: h = v0t – (g/2)t2, або h=20t–5t2. Із аналізу рівняння руху ясно, що для визначення максимальної висоти підйому тіла (h=hmax) необхідно визначити час цього підйому t=tmax.
Оскільки на максимальній висоті, тобто в момент часу t=tmax, швидкість тіла дорівнює нулю, та зважаючи на те, що величина цієї швидкості визначається за формулою v=v0–gt, можна записати: v0–gtmax=0. Звідси, tmax = v0/g = 20(м/с)/10(м/с2) =2с.
Таким чином: hmax=20tmax – 5tmax2 = 20(м/с)2с – 5(м/с2)(2с)2 = 40м – 20м =20м
Відповідь: hmax=20м.
Задача 4. З якою швидкістю тіло кинули вертикально вгору, якщо воно повернулося через дві секунди?
Дано :
tпол = 2с
v0 = ?
Рішення: Виконуємо малюнок, задаємо систему координат та записуємо відповідне рівняння руху тіла, тобто формулу яка має вигляд h=h0+v0t+(g/2)t2. А оскільки в умовах даної задачі h0=0м; g=10м/с2, то рівняння руху набуває вигляду: h = v0t – (g/2)t2. Виходячи з того, що 2с, це час польоту тіла, тобто той час за який тіло вилетівши з рівня h=0 знову повертається на рівень h=0, можна записати v0t – (g/2)t2 =0, звідси v0t = (g/2)t2, звідси v0 = gt/2.
Розрахунки: v0 = gt/2 = 10(м/с2)2с/2 = 10м/с.
Відповідь: v0 = 10м/с.
Рух тіла кинутого горизонтально, або під кутом до горизонту є криволінійним, причому таким, який завжди можна розкласти на дві складові: рівномірний (v=const) горизонтальний та рівноприскорений (a=const) вертикальний. А це означає, що описуючи такий криволінійний рух, можна записати два незалежних рівняння, аналіз яких дозволяє відповісти на практично будь які запитання кінематики. На підтвердження вище сказаного розглянемо декілька конкретних задач.
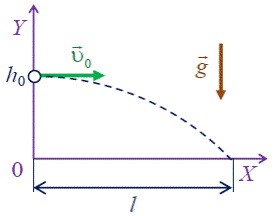
Задача 5. Тіло, що знаходиться на висоті 10м кинули горизонтально з швидкістю 20 м/с. Визначити горизонтальну дальність польоту тіла.
Дано:
h0 = 10 м
v0 = 20 м/с
ℓ = ?
Рішення: Виконуємо малюнок який відображає наявну ситуацію та задаємо відповідну систему координат. Криволінійний рух даного тіла по суті є результатом двох незалежних рухів: рівномірного горизонтального та рівноприскореного вертикального. Зважаючи на ці обставини, задаємо систему координат і записуємо рівняння кожного окремого руху, тобто формулу яка має вигляд х=х0+v0t+(a/2)t2.
– горизонтальний рух: оскільки х=ℓ; х0=ℓ0=0м; a=0м/с2, то ℓ=v0t
– вертикальний рух: оскільки х=h; х0=h0; v0=0м/с; a=g=10м/с2, то h=h0 – gt2/2.
Таким чином даний рух описують два рівняння:
1) ℓ = v0t, або ℓ=20t;
2) h = h0 – gt2/2, або h=10 – 5t2.
Із аналізу рівнянь ясно, що для того щоб визначити дальність польоту тіла (ℓ=20t), необхідно визначити тривалість цього польоту (t=tпол). А оскільки в момент падіння тіла, h=0, то 10 – 5(tпол)2= 0, звідси (tпол)2=(10/5)=2с2, звідси tпол=√2=1,4с.
Розрахунки: ℓ=20tпол= 20(м/с)1,4с= 28м.
Відповідь: ℓ=28м.
Тепер, коли ви ознайомились з закономірностями руху тіла кинутого горизонтально, можна розглянути і більш загальний рух – рух тіла кинутого під кутом до горизонту.
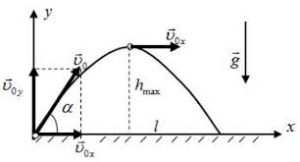
Мал.18. Кінематика руху тіла кинутого під кутом до горизонту.
На перший погляд, такий рух здається значно складнішим за рух тіла кинутого горизонтально. Насправді ж відмінності між цими рухами не такі вже й суттєві. Дійсно. Якщо вектор початкової швидкості (v0) розкласти на дві складові:
– горизонтальну vx=v0 cosα
– вертикальну vy=v0 sinα,
то даний криволінійний рух можна представити як результуючу двох лінійних рухів: рівномірного горизонтального та рівноприскореного вертикального. При цьому, кожен з цих рухів можна описати відповідним рівнянням. Наприклад, представлений на мал.19 рух, можна описати системою двох рівнянь:
ℓ=(v0 cosα)t;
h=(v0 sinα)t – gt2/2.
Доречно зауважити, що в процесі руху тіла кинутого під кутом до горизонту, горизонтальна складова його швидкості (vx=v0cosα) залишається незмінною (звичайно за умови не суттєвості опору повітря), а вертикальна складова цієї швидкості, змінюється за законом vy = v0 sinα – gt (спочатку зменшується до нуля, а потім збільшується).
Загальні зауваження. Сподіваюсь ви бодай щось чули про синус та косинус кута. А якщо не чули, то на даному етапі просто запам’ятайте:
|
кут α |
0° |
30° |
45° |
60° |
90° |
|
sinα |
0,00 |
0,50 |
0,71 |
0,87 |
1,00 |
|
cosα |
1,00 |
0,87 |
0,71 |
0,50 |
0,00 |
Задача 6. Снаряд вилетів з дула гармати під кутом 30° до горизонту, з швидкістю 800м/с. Визначити дальність польоту снаряду та максимальну висоту його підйому.
Дано:
v0 = 800м/с
α = 30°
ℓ = ? hм = ?
Рішення: Виконуємо малюнок який відображає наявну ситуацію та задаємо відповідну систему координат. Розкладаємо вектор початкової швидкості (v0) на дві складові:
vx=v0cosα = v0cos30° = 800(м/с)·0,87 = 696м/с;
vy=v0sinα = v0sin30° = 800(м/с)·0,5 = 400м/с.
Записуємо рівняння горизонтальної та вертикальної складової руху снаряду:
ℓ = (v0cosα)t = 696t;
h = (v0sinα)t – gt2/2 = 400t – 5t2.
Виходячи з того, що в момент падіння h=0м, визначаємо час польоту снаряду:
якщо t=tпол то h = 400t – 5t2 = 0, або t(400 – 5t) = 0, звідси
1) t = 0
2) 400 – 5t = 0, або 5t = 400, або t = 400/5 = 80c.
Отримані результати говорять про те, що на нулевій висоті (h=0) снаряд побував двічі: в момент вильоту з дула гармати (t=0c); в момент падіння на землю (t=80с).
Оскільки, тривалість польоту снаряду визначається як проміжок часу між моментом його вильоту та моментом падіння, то ясно, що tпол = 80с.
Знаючи час польоту снаряду, не важко визначити дальність його польоту:
ℓ = 696tпол = 696(м/с)80с = 55680м = 55,68км.
Відповідь: ℓ = 55км; hм = 8км.
Потрібно зауважити, що для тих швидкостей з якими рухаються кулі та снаряди, опір атмосферного повітря є дуже великим. Тому реальні параметри траєкторії руху снаряду, дальності та висоти його польоту, будуть суттєво відрізнятись від тих, які отримані без врахування опору повітря.
Контрольні запитання.
- Що називають вільним падінням тіла?
- Чи залежить величина і напрям прискорення вільного падіння тіла від: а) напрямку руху цього тіла; б) маси падаючого тіла; в) маси Землі?
- Одне тіло випустили з руки, а друге кинули вертикально вниз. Яке з цих тіл матиме більше прискорення вільного падіння?
- Тіло кинули вертикально вгору. Чому ми стверджуємо, що те прискорення з яким рухається тіло направлене вертикально вниз?
- Чи може тіло, маючи нульову швидкість, мати певне прискорення? Наведіть приклад.
- Чи залежить час польоту тіла, кинутого горизонтально, від величини його початкової швидкості? Від чого залежить час польоту тіла кинутого горизонтально?
- Від чого залежить дальність польоту тіла кинутого горизонтально?
- Тіло кинули горизонтально. Як змінюється в процесі польоту швидкість тіла?
- Від чого залежить дальність польоту тіла кинутого під кутом до горизонту?
- Як змінюється в процесі польоту швидкість тіла кинутого під кутом до горизонту?
Вправа 6.
- Визначити глибину ущелини, якщо камінь, падаючи без початкової швидкості досягне її дна за 5с.
- Тіло без початкової швидкості падає з висоти 30м. Визначити його швидкість в момент падіння.
- Камінь кинули вертикально вниз з початковою швидкістю 7м/с. З якої висоти кинули камінь, якщо він падав 1,5с?
- Стрілу випустили з лука вертикально вгору. При цьому, вона впала на землю через 6с. Яка початкова швидкість стріли і максимальна висота її підйому?
- З висоти 10м без початкової швидкості падає тіло. Одночасно з висоти 2м, вертикально вгору кинули друге тіло з початковою швидкістю 10м/с. На якій висоті зустрінуться ці тіла кинули це тіло?
- Тіло, що знаходиться на висоті 15м кинули горизонтально з швидкістю 15м/с. Визначити горизонтальну дальність польоту тіла.
- Тіло, що знаходиться на висоті 15м кинули горизонтально з швидкістю 20 м/с. Визначите координати цього тіла через 1с польоту.
- З вікна в горизонтальному напрямку кинули м’яч з швидкістю 10м/с. При цьому м’яч упав на землю через 2с. З якої висоти було кинуто м’яч і на якій відстані від будинку він упав?
- Тіло кинули під кутом 60° до горизонту, з швидкістю 20м/с. Визначити дальність польоту та максимальну висоту підйому тіла.
.
Лекційне заняття №7. Тема: Рівномірний рух по колу. Доцентрове прискорення. Період та частота обертання.
Довільний поступальний рух матеріальної точки (тіла) можна представити як певну сукупність прямолінійних та криволінійних ділянок. Наприклад, в процесі руху дорогами міста, траєкторія руху автомобіля зазвичай представляє собою певну сукупність прямолінійних та криволінійних ділянок (мал.19а).
В загальному випадку, криволінійна траєкторія руху матеріальної точки може бути надзвичайно складною. Однак будь яку криволінійну траєкторію, можна представити як певну сукупність фрагментів кіл (мал.19б). А це означає, що знаючи закономірності руху матеріальної точки по колу, можна описати будь який криволінійний рух.
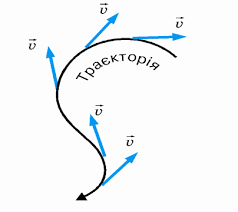
Мал.19. Довільний рух матеріальної точки, представляє собою певну сукупність прямолінійних та криволінійних ділянок. При цьому, будь який криволінійний рух, можна представити як певну сукупність фрагментів кіл.
Характерною особливістю руху матеріальної точки по колу є те, що в незалежності від швидкості руху, ця точка завжди рухається з певним прискоренням, яке характеризує зміну швидкості за напрямком. Дійсно, припустимо що матеріальна точка з певною незмінною за величиною (модулем) швидкістю (|v1| = |v2| = … = const), рухається по колу радіусу R (мал.20а). Не важко бачити, що в процесі такого руху, напрям швидкості постійно змінюється(v1 ≠ v2 ≠… ≠ const). А це означає, що відповідна точка рухається з певним прискоренням, яке характеризує зміну швидкості за напрямком. Це прискорення називають доцентровим (позн. ад). Така назва обумовлена фактом того, що в будь якій точці траєкторії, доцентрове прискорення направлено до центру того кола яке описує відповідна точка (мал.21б).
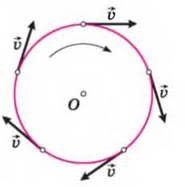
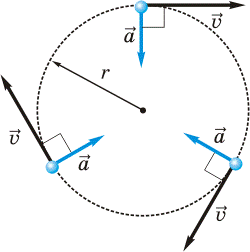
v1 = v2 = const ; v1 ≠ v2 ≠ const
Мал.20. В процесі руху матеріальної точки по колу, напрям її швидкості постійно змінюється і тому вона рухається з відповідним прискоренням.
Виходячи з визначального рівняння прискорення (а=∆v/∆t), можна довести, що величина доцентрового прискорення визначається за формулою ад =v2/R, де v – швидкість тіла в даній точці траєкторії; R – радіус кривизни цієї траєкторії.
Доцентрове прискорення – це таке прискорення, яке характеризує зміну швидкості за напрямком і яке дорівнює відношенню квадрату швидкості руху тіла (матеріальної точки) до радіусу кривизни його траєкторії у відповідній точці.
Позначається: ад
Визначальне рівняння: ад=v2/R
Одиниця вимірювання: [ад]= м/с2, метр за секунду в квадраті.
Таким чином, якщо тіло рухається по колу, то в незалежності від того змінюється модуль його швидкості, чи не змінюється, це тіло має певне доцентрове прискорення, величина якого визначається за формулою ад=v2/R, і яке завжди направлено до центру відповідного кола.
Не важко збагнути, що на прямолінійних ділянках траєкторії, доцентрове прискорення неминуче дорівнює нулю. І це природньо. Адже на таких ділянках, напрям швидкості залишається незмінним і тому прискорення, яке характеризує зміну швидкості за напрямком має бути нулевим. Те, що на прямолінійних ділянках траєкторії, доцентрове прискорення дорівнює нулю, випливає не лише з визначення цього прискорення, а й з його визначального рівняння. Дійсно. Будь-яку прямолінійну ділянку траєкторії, можна вважати частиною кола з безкінечно великим радіусом (R = ∞). А це означає, що для таких ділянок aд=v2/R=v2/∞= 0.
Рух по колу є надзвичайно поширеним як в природі загалом так і в штучно створеній техніці зокрема. По колу рухаються елементи коліс, шківів, валів та шестерень машин і механізмів. По колу рухаються точки секундних, хвилинних та годинникових стрілок годинників, лопатей вентиляторів, вітряків, турбін та корабельних двигунів. Практично по колу Місяць обертається навколо Землі, Земля – навколо Сонця, Сонце – навколо центру Галактики, а Галактика – навколо центру Метагалактики. Певною комбінації кіл рухаємся ми з вами в процесі обертання Землі навколо своєї осі, навколо Сонця, навколо центра Галактики та центра Метагалактики.

Мал. 21. Деякі приклади руху тіл та елементів тіл по колу.
Якщо в процесі руху по колу, модуль швидкості матеріальної точки залишається незмінним (v=const), то відповідний рух називають рівномірним рухом матеріальної точки по колу. Рівномірний рух матеріальної точки по колу характеризується не лише певною швидкістю (v) та певним доцентровим прискоренням (ад), а й певною повторюваністю (періодичністю). Цю повторюваність характеризують двома величинами: періодом обертання (Т) та частотою обертання (ν). Наприклад, період обертання секундної стрілки годинника становить 60с, період обертання Землі навколо своєї осі – одна доба (Т=доба=86400с); період обертання Місяця навколо Землі – 27,3доби (Т=27,3доби=2,36·106с); період обертання Землі навколо Сонця – один рік (Т=рік=3,2·107с); період обертання Сонячної системи навколо центру Галактики – 240 мільйонів земних років.

Мал.22. Рівномірний рух по колу, характеризується не лише певною швидкістю (v) та певним доцентровим прискоренням (ад), а й певною повторюваністю (періодичністю).
Період обертання (період) – це фізична величина, яка характеризує часову періодичність (повторюваність) обертального процесу і яка дорівнює тому проміжку часу за який система здійснює один повний оберт.
Позначається: Т
Визначальне рівняння: Т = t/n, де n – кількість обертів системи здійснених за час t;
Одиниця вимірювання: [Т] = с, секунда.
Наприклад, якщо матеріальна точка в процесі рівномірного руху по колу за 5с здійснила 10 обертів, то період її обертання 0,5с: Т= t/n = 5с/10= 0,5с.
Частота обертання (частота) – це фізична величина, яка характеризує частотну періодичність обертального процесу і яка дорівнює тій кількості обертів системи, яку вона здійснює за одиницю часу.
Позначається: ν (ню)
Визначальне рівняння: ν = n/t
Одиниця вимірювання: [ν] = 1/c = Гц, герц.
Наприклад, якщо матеріальна точка в процесі рівномірного руху по колу за 5с здійснила 10 обертів, то період її обертання 2Гц: ν=n/t=10/5c=2(1/с)=2Гц.
Із визначальних рівнянь періоду і частоти (T=t/n; ν=n/t) з усією очевидністю випливає, що ці фізичні величини взаємопов’язані, і що цю взаємопов’язаність відображають співвідношення: T=1/ν; ν=1/T. Тому якщо, наприклад, за умовою задачі задано період обертання системи Т=4с, то ви завжди можете визначити частоту цього обертання ν=1/Т=1/4с=0,25Гц, і навпаки, якщо ν=50Гц, то Т=1/50Гц=0,02с.
Задача 1. За 10с колесо автомобіля зовнішній радіус якого 25см, здійснює 100 обертів. Визначте період та частоту обертання колеса. Визначте швидкість руху автомобіля.
Дано:
t = 10с
n = 100
R=25см = 0,25м
T=?; ν=?; vавт = ?
Рішення: Оскільки за визначенням T=t/n; ν=n/t, то Т=10с/100=0,1с; ν=100/10с=10Гц. Оскільки v=s/t, та зважаючи, що за один оберт колеса (за t=Т), автомобіль переміщується на s=2πR, можна записати vавт =s/t=2πR/T=2·3,14·0,25м/0,1с=15,7м/c=56,5км/год.
Відповідь: Т=0,1с; ν=10Гц; vавт=15,7м/с.
Задача 2. Відомо, що радіус Землі 6370км, а період її обертання навколо власної осі 1 доба. Визначити швидкість обертання тих тіл які знаходяться на екваторі Землі та величину їх доцентрового прискорення.
Дано:
R = 6400км = 6,4·106м
T = 1доба = 8,64·104с
v = ? ад = ?
Рішення: Оскільки за визначенням v=s/t, та враховуючи, що за один повний оберт Землі (t=T), ті тіла які знаходяться на її екваторі проходять шлях s=2πR, можна записати v =s/t=2πR/T.
Розрахунки: v =2πR/T = 2·3,14·6,4·106м/8,64·104с = 465м/с = 1670км/год.
Оскільки за визначенням aд=v2/R, то aд=v2/R = (465(м/с))2/6,4·106м = 0,216·106/6,4·106 = 0,034м/с2.
Відповідь: v = 1670км/год; ад = 0,034м/с2.
Узагальнюючі відомості про основні поняття, величини та закони кінематики поступального руху, можна представити у вигляді наступної таблиці.
|
Основні поняття |
Основні фізичні величини |
Основні закони |
|
Механіка Кінематика Механічний рух Поступальний рух Матеріальна точка Відносність руху Система відліку Траєкторія |
час t (с) координата x=ℓх (м) пройдений шлях s=∆x (м) швидкість v=∆x/∆t (м/с) прискорення: a=∆v/∆t (м/с2) звичайне a=∆v/∆t (м/с2) доцентрове aд=v2/R (м/с2) |
Рівняння руху x = x0 + v0t + (a/2)t2
|
Контрольні запитання.
- Чому матеріальна точка, яка з постійною за модулем швидкістю рухається по колу, рухається з прискоренням? Як називається це прискорення? Чому воно має таку назву?
- Доведіть, що на прямолінійних ділянках траєкторії, доцентрове прискорення завжди дорівнює нулю.
- Чи може тіло, яке рухається прямолінійно, рухатись з доцентровим прискореннями? з лінійним прискоренням?
- Чи може тіло, яке рухається по колу, рухатись без доцентрового прискорення? без лінійного прискорення?
- Чи може повне прискорення тіла дорівнювати його лінійному прискоренню? його доцентровому прискоренню? нулю?
- Які величини характеризують повторюваність обертального руху? Як пов’язані ці величини?
- Доведіть, що між періодом обертання Т, радіусом кола R та тією лінійною швидкістю v з якою матеріальна точка рухається по колу, існує співвідношення v=2πR/T.
- Чому в процесі добового обертання Землі, лінійні швидкості різних за широтою точок її поверхні є різними? В яких місцях ця швидкість є найбільшою, а в яких – найменшою?
Вправа №7.
- Автомобіль рухається заокругленням дороги радіус якого 100м, зі швидкістю 36км/год. Чому дорівнює доцентрове прискорення автомобіля?
- Якого радіусу має бути заокруглення дороги, щоб при швидкості 72км/год доцентрове прискорення автомобіля становило 1м/с2?
- За 20 секунд колесо автомобіля здійснює 40 обертів. Визначити період та частоту обертання колеса.
- Визначити період і частоту обертання секундної, хвилинної та годинникової стрілок годинника.
- Вал діаметром 20см при обертанні робить один оберт за 0,4с. Визначте лінійну швидкість точок на поверхні вала.
- Частота обертання коліс автомобіля 15Гц. З якою швидкістю рухається автомобіль, якщо зовнішній радіус його коліс 30см?
- З якою лінійною швидкістю Земля обертається навколо Сонця, якщо радіус земної орбіти 1,5∙108км? Порівняйте цю швидкість зі швидкістю кулі 0,5км/с. Зробіть висновки.
.
Лекційне заняття №8. Тема: Статика. Сила. Додавання векторних величин.
Статика (від грецького statike – рівновага) – це розділ механіки в якому вивчають параметри, закономірності та причини стану механічної рівноваги тіла. Механічною рівновагою тіла (матеріальної точки) називають такий механічний стан тіла, при якому воно знаходиться в стані механічного спокою (v=0), або в стані прямолінійного рівномірного руху (v=const). Зазвичай в статиці розглядають ті ситуації коли тіло знаходиться в стані механічного спокою. Однак ви маєте знати, що з фізичної точки зору, між станом механічного спокою тіла (v=0) та станом його прямолінійного рівномірного руху (v=const) нема суттєвої різниці. А якщо вам потрібні докази цьому на перший погляд парадоксальному факту, то запитайте себе чи відчуваєте факт того, що Земля з швидкістю 30км/с обертається навколо Сонця, а навколо центру нашої Галактики вона обертається з швидкістю 250км/с? Втім, про те що означає твердження «з фізичної точки зору, між станом механічного спокою тіла (v=0) та станом його прямолінійного рівномірного руху (v=const) нема суттєвої різниці», ми поговоримо дещо пізніше, а точніше – коли буде з’ясовано фізичну суть того базового закону який називається принципом відносності. Наразі ж, будемо вважати, що ті силові закономірності які справедливі для стану механічного спокою тіла, є справедливими і в тому випадку, коли це тіло перебуватиме в стані прямолінійного рівномірного руху.
Основною фізичною величиною статики є сила. Сила – це фізична величина, яка характеризує силову дію одного тіла на інше (є мірою взаємодії фізичних об’єктів) і яка дорівнює добутку маси тіла на величину того прискорення яке воно отримує під дією даної сили.
Позначається: F
Визначальне рівняння: F=ma
Одиниця вимірювання: [F]= кг∙м/с2= H, ньютон.
Ньютон – це одиниця вимірювання сили, що дорівнює такій силі, яка тілу масою 1кг надає прискорення 1м/с2: 1Н=1кг∙1м/с2. Іншими словами, якщо тіло масою 1кг рухається з прискоренням 1м/с2, то це означає, що на нього діє сила 1Н. Звичайно, мається на увазі, що тіло масою 1кг знаходиться під дією лише однієї зовнішньої сили. Адже якщо наприклад, дерев’яний брусок масою 1кг прибити, прикрутити чи приклеїти до підлоги, а потім прикласти до нього силу 1Н, то брусок не отримає очікуваного прискорення. Не отримає тому, що в місці з’єднання бруска з підлогою неминуче виникне ще одна сила, яка протидіятиме переміщенню бруска.
Відразу ж зауважимо, що величину сили в один ньютон не можливо оцінити візуально, як це наприклад можна зробити з одиницею довжини метром. Ньютон, це одиниця вимірювання сили, тобто тієї величини яка характеризує силову дію одного фізичного об’єкту на інший. Тому величину ньютона можна оцінити лише за його силовою дією. Скажімо, загально відомо, що всі тіла притягуються до землі з силою, яку прийнято називати силою тяжіння. Відомо й те, що під дією сили тяжіння всі тіла, в тому числі і ті маса яких 1кг, падають з прискоренням 9,8м/с2. А це означає, що на тіло масою 1кг діє сила тяжіння 9,8Н: F =1кг∙9,8м/с2=9,8Н.
Таким чином, якщо ви візьмете в руку тіло масою 1кг, то відчуєте силу 9,8Н. Запитується: тіло якої маси потрібно взяти в руку, щоб вона відчула силу в один ньютон? Правильно, маса цього тіла має становити 102г :
m=F/a=1Н/9,8(м/с2)=0,102кг=102г.
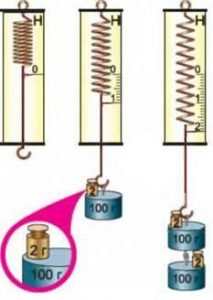
Мал.23. Один Ньютон дорівнює тій силі, з якою тіло масою 102 грами притягується до Землі.
От тільки не потрібно стверджувати, що в одному ньютоні міститься 102 грами. Бо це все рівно ніби наполягати на тому, що в одному метрі міститься сто секунд, або, що кілограм більший за секунду. Адже кілограм не більший і не менший за секунду. Бо кілограм – це кілограм, метр – це метр, секунда – це секунда, а ньютон – це ньютон. І порівнювати ці абсолютно різні одиниці не можна. Метр можна порівнювати з міліметром, кілометром чи, скажімо, з дюймом, тобто з іншими одиницями довжини. Але метр не можна порівнювати з секундою, кілограмом, ньютоном чи наприклад, з метром квадратним. Тому, коли ми говоримо, що силі в один ньютон відповідає вага тіла масою 102 грами, то маємо на увазі лише те, що на Землі силу в один ньютон можна відчути тримаючи в руці тіло масою 102 грами.
На практиці, величину сили визначають не за тим якого прискорення надає ця сила тілу визначеної маси, а за тим як вона деформує пружне тіло, наприклад пружину. Прилади які працюють за даним принципом називаються динамометрами (від грец. dynamis – сила та metreo – вимірювати). Динамометр, це прилад який дозволяє вимірювати величину діючої на нього сили. Основним елементом динамометра (мал.24) є певне пружне тіло (пружина), яке під дією зовнішньої сили певним чином деформується. Власне за величиною цієї деформації і визначають величину деформуючої сили.

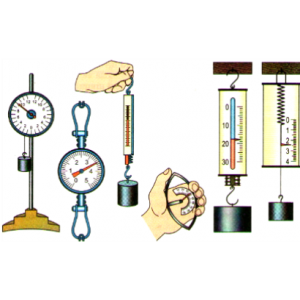
Мал.24. Загальний вигляд деяких різновидностей динамометрів.
Сила – величина векторна, тобто така, яка характеризується не лише величиною (модулем) а й напрямком дії. І це закономірно, адже результат дії сили залежить не лише від її величини, а й від того напрямку в якому ця сила діє. Скажімо якщо сила F штовхає тіло вправо, то тіло буде рухатись вправо. Якщо ж аналогічна сила штовхатиме тіло вліво, то воно буде рухатись вліво. Втім, результат дії сили, залежить не лише від її величини та напрямку дії, а й від точки прикладання цієї сили. Наприклад, якщо силу F прикласти до тієї книги, що лежить на столі, в точці А або С (мал.25), то книга буде рухатись поступально. Якщо ж аналогічну за напрямком та величиною силу прикласти до точки В, то рух книги буде обертальним.
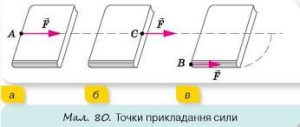
Мал.25. Результат дії сили залежить не лише від її величини та напрямку дії, а й від точки прикладення сили.
Зазвичай на тіло діє не одна сила, а їх певна сукупність. Сукупність тих сил що діють на дане тіло в даний момент часу називають системою сил. Наприклад, на представлене на мал.26 тіло, діє системи чотирьох сил: F1; F2; F3; F4. Систему сил, лінії дії яких перетинаються в одній точці, називають збіжною системою сил. Скажімо, зображена на мал.26 система сил є збіжною. Адже лінії дії всіх чотирьох сил перетинаються в одній точці – точці К.
Якщо тверде тіло знаходиться під дією збіжної системи сил, то: по-перше, це тіло можна вважати матеріальною точкою, а по-друге, систему таких сил можна замінити однією рівнодійною силою. Рівнодійною силою (позначається R або Fр), називають таку силу, яка чинить на тіло (матеріальну точку) таку ж силову дію як і вся система реально діючих сил і яка дорівнює векторній сумі тих сил що реально діють на дане тіло, тобто R=F1+F2+ … +FN. Це означає, що заміна системи реально діючих на тіло сил, відповідною рівнодійною силою, не змінить механічну поведінку тіла. Потрібно підкреслити, що рівнодійною силою можна замінити лише систему збіжних сил, тобто таких сил лінії дії яких перетинаються в одній точці.
Мал.26. Систему діючих на тіло збіжних сил, можна замінити їх рівнодійною силою.
Фізичні величини поділяються на скалярні та векторні. Наприклад, час (t), маса (m), площа (S), об’єм (V), густина (ρ), температура (T), енергія (E), робота (A), потужність (N) – величини скалярні. Натомість, сила (F), швидкість (v), прискорення (a), імпульс (p) – величини векторні.
Скалярними називають такі фізичні величини, які характеризуються лише числовим значенням, тобто лише своєю абсолютною величиною. Векторними називають такі фізичні величини, які характеризуються як величиною так і напрямком у просторі (кутовою орієнтацією в вибраній системі координат). Наприклад маса тіла (m) характеризується лише числовим значенням (величиною) і тому є величиною скалярною. А та сила (F) що діє на тіло, характеризується як числовою величиною, так і напрямком дії і тому є величиною векторною.
Векторна величина позначається відповідною буквою з стрілкою над нею, або буквою написаною жирним шрифтом (F, v, a, p). При цьому, якщо в тій чи іншій ситуації, векторна величина позначається буквою без стрілки, або буквою написаною не жирним шрифтом (F, v, a, p), то це означає, що мова йде лише про числове значення відповідної величини.
Векторні та скалярні величини суттєво відрізняються в багатьох відношеннях і перш за все тим, що арифметичні дії над ними виконуються по різному. Наприклад, якщо до тіла масою 3кг (m1=3кг) додати тіло масою 2кг (m2=2кг), то в результаті ми отримаємо тіло загальною масою 5кг, тобто: m1+m2=3кг+2кг=5кг. Якщо ж на тіло діють дві сили F1=3H i F2=2H (мал.27), то результат їх загальної дії (F1+F2) буде залежати від того, як направлені ці сили. При цьому, якщо сили співнаправлені, то F1+F2=5Н, якщо сили протилежно направлені, то F1+F2=1Н, а якщо сили перпендикулярно направлені, то F1+F2=3,5Н.
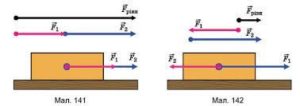
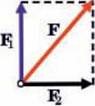
Мал.27. Результат додавання векторів залежить не лише від їх величин, а й від їх відносної орієнтації. При цьому, в загальному випадку F1+F2≠F1+F2.
Розрізняють два способи додавання векторних величин: геометричний (графічний) та алгебраїчний (аналітичний). При геометричному способі, результат додавання векторів отримують шляхом відповідних геометричних побудов. Ці побудови здійснюють так званим методом багатокутника. Суть цього методу гранично проста. Якщо на точку К (мал.28) діє система N векторів, то величину і напрям результуючого вектора (R = F1+F2+ … +FN) визначають наступним чином. З точки К відкладають вектор F1, з кінця вектора F1 відкладають вектор F2, з кінця вектора F2 – вектор F3 і так до останнього вектора FN. Вектор, який з’єднує точку К з кінцем останнього вектора і буде результуючим вектором R = F1+F2+ … +FN.
Мал.28. При геометричному додаванні векторів величину та напрям результуючого вектору визначають методом багатокутника.
Задача 1. Графічним методом визначити рівнодійну зображених на малюнку сил.
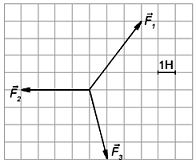
Нагадаємо. Суть графічного (геометричного) методу розв’язування задач полягає в тому, що на основі максимально точних геометричних побудов, з дотриманням вибраного масштабу та з застосуванням відповідних геометричних приладів (лінійка, транспортир, циркуль, тощо), отримують графічну відповідь на поставлені в задачі запитання. Головна перевага графічного методу, його наочність та загальна простота. Основний недолік – залежність точності отриманого результату від точності геометричних побудов. Втім, в умовах даної конкретної задачі, наявність масштабної сітки значно спрощує графічне рішення задачі.
Рішення. З кінця вектора F1 відкладаємо вектор F2 (чотири горизонтальні клітинки вліво), а з отриманого при цьому кінця вектора F2 відкладаємо вектор F3 (чотири клітинки вниз і одна клітинка вправо). Оскільки в даній ситуації початок першого вектора (F1) співпадає з кінцем останнього вектора (F3), то це означає, що величина результуючого вектора дорівнює нулю.
Відповідь: F1+ F2+ F3=0, рівнодійна сила дорівнює нулю.
Геометричний метод додавання векторів виглядає досить простим та наочним. Однак, він має ряд суттєвих недоліків. Перший полягає в тому, що точність його результатів залежить від масштабу та точності геометричних побудов. При цьому, будь яка точність побудов, не гарантує безумовно точного результату. Другим суттєвим недоліком геометричного методу додавання векторів є факт того, що таке додавання погано поєднується з тими теоріями, в яких закони записують у вигляді певних математичних формул. А переважна більшість фізичних теорій є саме такими.
Ці недоліки відсутні в алгебраїчному методі додавання векторів, тобто такому методі при якому результат додавання векторів визначають не шляхом геометричних побудов, а шляхом алгебраїчних розрахунків. Реалізуючи цю ідею, вектор F розкладають на дві складові: проекції вектора на осі системи координат Fx та Fy. При цьому, якщо той кут α який характеризує кутову орієнтацію вектора F виміряно від осі 0х, то Fx=Fcosα; Fy=Fsinα.
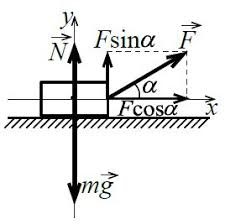
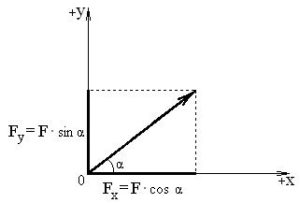
Мал.29. Будь який вектор F(F,α) можна представити у вигляді двох по суті скалярних величин – проекцій цього вектора на осі системи координат Fx=Fcosα; Fy=Fsinα.
По суті, проекції вектора на осі системи координат також є векторами. Однак, враховуючи факт того, що направлені вздовж однієї прямої вектори, додаються як скалярні величини, можна стверджувати: проекції вектора на осі системи координат, мають властивості скалярних величин. Тому в подальшому, ці проекції ми будемо вважати скалярними величинами, тобто такими які характеризуються лише величиною і знаком («+» якщо напрям проекції співпадає з додатним напрямком відповідної осі; «–» якщо ці напрямки протилежні).
Практична реалізація алгебраїчного методу додавання векторів та розв’язування задач статики, не можуть бути успішними без розуміння фізичної суті того, що називають синусом і косинусом кута. А ось тут то і починаються проблеми. Бо бачите, та навчальна дисципліна, вивчення якої починається ще з дитячого садочку і яка називається математикою (арифметикою, математикою, алгеброю, геометрією), живе своїм, тільки їй зрозумілим і тільки їй потрібним життям. І це при тому, що єдине призначення і єдина цінність математики в тому, щоб підготувати учня до вивчення практично важливих предметів як то фізика, хімія, інформатика, інженерна, робітнича чи бухгалтерська справа. А коли в сьомих, восьмих та дев’ятих класах, вчитель фізики замість того щоб навчати цій самій фізиці, починає пояснювати учням як великі та малі числа представляються в стандартному вигляді, як додаються, віднімаються, множаться та діляться ці числа, як при визначенні невідомої величини трансформуються елементарні математичні співвідношення, то вибачте, але виникає питання: шановні, а що ж ви вивчали всі ці сім, вісім, дев’ять років.
Класичним прикладом математики за ради математики є історія з тим, що називають синусом та косинусом кута. Адже в математиці (геометрії) певні розмови про синус та косинус починаються вже після того, як у фізиці ці функції мають широке застосовування. При цьому синус та косинус кута в математиці визначають виключно як певні співвідношення між сторонами прямокутного трикутника. Синусом гострого кута α прямокутного трикутника називають відношення протилежного катета a до гіпотенузи с: sinα=a/c. Косинусом гострого кута α прямокутного трикутника називають відношення прилеглого катета b до гіпотенузи с: cosα=b/c.
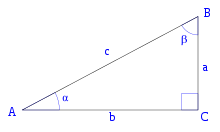
мал.30. В математиці синус та косинус кута визначають як певні співвідношення між сторонами прямокутного трикутника: cosα=b/c; sinα=a/c.
З формальної точки зору, вище сформульовані визначення (cosα=b/c; sinα=a/c) є правильними. Однак вони мають купу серйозних недоліків. По-перше, визначають синус та косинус кута не як надважливі загально наукові функції, а як містечкові співвідношення між сторонами прямокутного трикутника. По-друге, дозволяють визначати синуси та косинуси лише гострих кутів, тоді як ці функції мають певні значення для будь яких кутів, будь-то 30°; 60°; 135° чи 5784°. По-третє, не пояснюють факту того, чому значення косинусів та синусів можуть бути як додатними так і від’ємними. В четвертих, не пояснюють факту періодичності даних функцій. В п’ятих, не пояснюють купу тих співвідношень які в математиці називаються формулами приведення і які зазвичай є предметом банального зазубрювання. І нарешті, вище наведені визначення не розкривають фізичного, загально наукового змісту тих функцій які називаються синусом та косинусом кута. А цей зміст полягає в тому, що дані функції дозволяють векторні величини представляти у вигляді скалярних і навпаки. Всі ці недоліки практично відсутні при векторно-проекційному визначенні синуса та косинуса кута. А це визначення є наступним.
Косинус кута α (cosα) – це безрозмірна величина, яка дорівнює проекції відповідного цьому куту одиничного радіус-вектора на ту вісь від якої виміряно кут α. Синус кута α (sinα) – це безрозмірна величина, яка дорівнює проекції відповідного цьому куту одиничного радіус-вектора на ту вісь, що є перпендикулярною до осі від якої виміряно кут α.
Ілюструючи суть даних визначень та механізм вимірювання синусів і косинусів кутів, розв’яжемо конкретну задачу.
Задача. Шляхом прямих вимірювань, визначити синуси та косинуси наступних кутів: 0°; 30°; 45°; 60°; 90°; 120°; 135°; 150°; 180°.
Рішення. У вибраній системі координат, циркулем проводимо напівколо максимально великого радіусу і приймаємо величину цього радіусу за одиницю. З застосуванням транспортира та лінійки, почергово відкладаємо потрібні кути та проводимо відповідні одиничні радіус-вектори. З кінців цих векторів опускаємо перпендикуляри на осі системи координат і враховуючи масштаб побудов, вимірюємо довжини відповідних проекцій (мал.31). Величини та знаки цих довжин і є значеннями відповідних функцій.
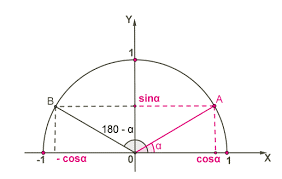
Мал.31. Синус та косинус довільного кута можна визначити як проекції відповідного цьому куту одиничного радіус-вектора на осі прямокутної системи координат.
. Результати вимірювань записуємо в таблицю. Порівнюємо ці результати з відповідними табличними (точними) значеннями. (Ясно, що точність отриманих вами результатів визначальним чином залежатиме від точності та масштабу геометричних побудов і вимірювань).
|
α |
0° |
30° |
45° |
60° |
90° |
120° |
135° |
150° |
180° |
|
сosα |
1,00 |
0,87 |
0,71 |
0,50 |
0,00 |
–0,50 |
–0,71 |
–0,87 |
–1,00 |
|
sinα |
0,00 |
0,50 |
0,71 |
0,87 |
1,00 |
0,87 |
0,71 |
0,50 |
0,00 |
Потрібно зауважити, що коли ми стверджуємо: проекції вектора F на осі прямокутної системи координат визначаються за формулами: Fx=Fcosα; Fy=Fsinα, то маємо на увазі, що кут α виміряно від осі 0х. Якщо ж положення вектора R характеризується кутом φ який веде свій відлік від осі 0у (мал.32а), то в цьому випадку Rx=Rsinφ; Ry=Rcosφ. Адже за визначенням, віссю косинусів є та вісь від якої веде відлік відповідний кут.
Зауважимо також, що на практиці проекції тих векторів, що є паралельними або перпендикулярними осям системи координат, визначають із міркувань очевидності: наприклад, в ситуації мал.32г: Fx=0; Fy= –F. Крім цього, оскільки положення вектора F зазвичай характеризують кутом меншим за 90° (α<90º), то знак проекції визначають із міркувань очевидності. Наприклад в ситуації мал.32в, проекція вектора F на вісь 0х має знак «–».
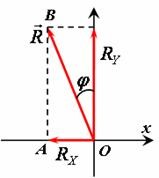
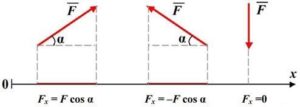
Мал.32. Визначаючи параметри проекцій вектора, потрібно враховувати від якої осі і в якому напрямку виміряно той кут, що характеризує положення відповідного вектора.
Задача 2. За заданим малюнком визначити проекції (величину та знак) векторів F1, F2, F3 на осі системи координат, якщо величина кожної сили 10Н, а α=30°, β=60°.
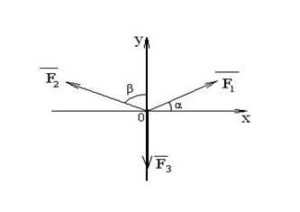
Рішення. На основі аналізу малюнку та числових значень відповідних величин, можна записати:
Fx1 = F1cosα = F1cos30° = 10Н·0,87 = 8,7Н;
Fу1 = F1sinα = F1sin30° = 10Н·0,50 = 5,0Н;
Fx2 = –F2sinβ = –F2sin60° = –10Н·0,87 = –8,7Н;
Fy2 = F2cosβ = F1cos60° = 10Н·0,50 = 5,0Н;
Fx3 = 0,0Н, (Fx3 = F1cos270° = 10Н·0,00 = 0,0Н);
Fy3 = –Fy = –10,0Н, (Fу3 = –F3sin270° = –10Н·1,00 = 10,0Н.
Контрольні запитання.
- Поясніть, що потрібно зробити, щоб відчути силу в один ньютон?
- Чи правильне твердження 1Н = 102г?
- Чи означає визначальне рівняння F=ma, що діюча на тіло сила залежить від маси тіла та його прискорення? Від чого залежить ця сила?
- Яку систему сил називають збіжною?
- Як визначають величину та напрямок рівнодійної сили?
- Що стверджується в законі, який називається умовою механічної рівноваги тіла?
- 7. Чим відрізняються векторні величини від скалярних?
- В чому суть геометричного методу додавання векторів?
- Які основні недоліки геометричного методу додавання векторів?
- В чому суть векторно-проекційного способу визначення функцій sinα та cosα? Які переваги має цей спосіб?
- З якої теореми випливає, що cos2α + sin2α = 1?
- В чому суть алгебраїчного методу додавання векторів?
Вправа №8.
- Під дією якої сили тіло масою 400г отримає прискорення 3м/с2?
- З яким прискоренням рухається під час розгону реактивний літак масою 60т, якщо сила тяги його двигунів 90кН?
- Визначити масу футбольного м’яча, якщо в процесі удару він набув прискорення 500м/с2, а сила удару дорівнює 420Н.
- Сила 60Н надає тілу прискорення 0,8м/с2. Яка сила надасть цьому тілу прискорення 2м/с2?
- М’яч масою 0,5кг після удару що триває 0,02с набуває швидкості 10м/с. Визначити силу удару.
- На тіло масою 5кг вздовж однієї прямої діють дві сили: 12Н і 8Н. Визначити прискорення цього тіла, якщо: а) сили співнаправлені; б) сили протинаправлені.
- Графічним методом визначте величину і напрям рівнодійної сили. Масштаб сил в обох ситуаціях однаковий: одна клітинка → 5Н.
а) б)
б) 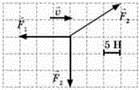
- Під дією якої сили тіло масою 20кг рухається за законом х=10t–0,4t2? Як направлена ця сила?
- Прямолінійний рух тіла описує рівняння х=50–10t+0,5t2. Під дією якої сили відбувається цей рух, якщо маса тіла 0,5кг? Як направлена ця сила?
- Вектор сили F=5H орієнтований відносно осі 0х під кутом: а) 0º; б) 30º; в) 90º; г) 135º; д) 210º; е) 270º; є) 300º. Визначте проекції даних векторів на осі прямокутної системи координат. Задачу розв’яжіть геометрично та алгебраїчно. Результати порівняйте.
- Визначте суму векторів: а) F1(5H;0º), F2(5H;90º), F3(5H;45º). Задачу розв’язати графічним та алгебраїчним методом.
- За заданим малюнком визначте проекції вектора F на осі системи координат, якщо величина вектора 5Н.
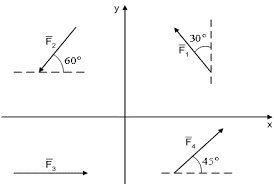
.
Лекційне заняття №9. Тема: Сила тяжіння. Реакція опори. Умова механічної рівноваги тіла. Загальні відомості щодо розв’язування задач статики.
В фізиці розрізняють багато різновидностей сили. Лише в механіці ми будемо вивчати що найменше вісім таких різновидностей:
– сила тяжіння Fт
– реакція опори N
– сила тертя Fтер
– сила інерції Fi
– вага P
– сила пружності Fпр
– гравітаційна сила Fгр
– сила Архімеда Fa .
Втім, кожна з цих сил є різновидністю однієї і тієї ж фізичної величини, яка називається силою, яка є мірою взаємодії фізичних об’єктів і яка вимірюється в ньютонах. Якщо ж говорити про ті сили які найчастіше зустрічаються в задачах статики, то ними є сила тяжіння та реакція опори.
Факт того, що на Землі тіла падають з певним прискоренням, безумовно вказує на те, що на них в напрямку прискореного руху діє певна сила. І як будь яку силу, її можна визначити за формулою F=ma. А оскільки величина того прискорення з яким падають земні тіла і яке називається прискоренням вільного падіння (прискоренням сили тяжіння), становить a=g=9,8м/с2, то діюча на них сила має визначатись за формую F=mg. Цю силу називають силою тяжіння.
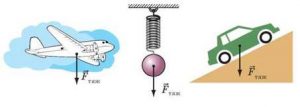
Мал.33. На всі земні тіла діє певна сила тяжіння, величина та напрям якої визначаються за формулою F=mg.
Сила тяжіння – це та сила, з якою тіло притягується до Землі і яка дорівнює добутку маси тіла на прискорення його вільного падіння.
Позначається: Fт
Визначальне рівняння: Fт = mg, де g=9,8м/с2
Одиниця вимірювання: [Fт] = кг·м/с2 = H, ньютон
По суті, сила тяжіння є тією силою, елементарні фрагменти якої діють на всі точки тіла. Однак можна довести, що результуюча тих елементарних сил тяжіння які діють на фрагменти даного тіла, прикладена до центру мас цього тіла. Тому вважається, що сила тяжіння діє на центр маси тіла.
Сила тяжіння прагне перемістити будь яке тіло в центр Землі. А оскільки земні тіла не опиняються в цьому центрі, то ясно, що на своєму шляху вони неминуче зустрічають певні перешкоди. Цими перешкодами часто є ті об’єкти які прийнято називати опорами. Ту ж силу з якою опора діє на тіло називають реакцією опори.
Опорою називають будь яку механічну перешкоду, яка так чи інакше жорстко обмежує рух тіла. Наприклад, та підлога на якій ви стоїте, обмежує ваш рух в напрямку до центру Землі. Гнучка опора (канат, ланцюг, дріт, тощо), обмежує рух тіла в напрямку розтягування цієї опори. Шарнірно закріплений стержень, обмежує рух тіла як в напрямку розтягування стержня так і в напрямку його стискання.
Реакція опори – це та сила, з якою опора діє на тіло та жорстко протидіє переміщенню цього тіла.
Позначається: N
Визначальне рівняння: величина і напрям реакції опори визначається з умов конкретної задачі.
Одиниця вимірювання: [N] = H, ньютон

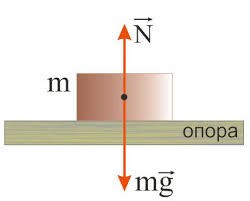
Мал.34. Опора – це та перешкода яка жорстко обмежує рух тіла. Реакція опори – це та сила з якою опора діє на тіло.
Найпростішими і в той же час дуже поширеними опорами є плоска опора, гнучка опора та шарнірно закріплений стержень. Плоска опора – тверда рівна поверхня, яка протидіє переміщенню тіла в напрямку перпендикулярному до площини цієї поверхні. Реакція плоскої опори перпендикулярна до площини опори (мал.35а). Гнучка опора – тонка гнучка опора (трос, канат, нитка, мотузка, тощо), яка протидіє переміщенню тіла в напрямку розтягування цієї опори. Реакція гнучкої опори направлена вздовж опори в напрямку точки її закріплення (мал.35б). Реакцію гнучкої опори часто позначають буквою Т і називають силою натягу нитки, канату, троса, тощо. Шарнірно закріплений стержень – жорсткий стержень, який шарнірно (обертально рухомо) з’єднаний з відносно нерухомою поверхнею і який протидіє переміщенню тіла як в напрямку стискання стержня, так і в напрямку його розтягування. Реакція шарнірно закріпленого стержня направлена вздовж стержня мал.35в). При цьому: якщо стержень розтягується, то реакція опори направлена до точки закріплення стержня, а якщо стержень стискається – то від точки закріплення.
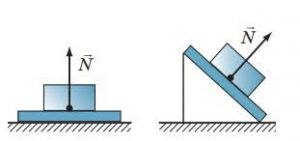
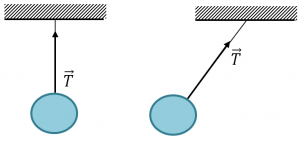
Мал.35. Напрямки реакцій опор: а) плоска опора, б) гнучка опора.
Потрібно зауважити, що сила тяжіння і реакція опори є тими зовнішніми силами, які діють на відповідне тіло, а не на опору чи щось інше. Що правда, точки прикладання цих сил є суттєво різними: сила тяжіння прикладена до центру мас тіла, а реакція опори діє в точках контакту тіла з відповідною опорою (мал.36а). Втім, в більшості задач механіки матеріальної точки, прийнято вважати що і сила тяжіння і реакція опори, прикладені до центру мас тіла (мал.36б).
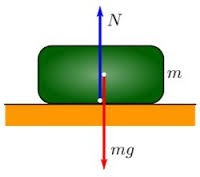
Мал.36. Сила тяжіння і реакція опори, діють на тіло, а не на опору чи щось інше.
Основний закон статики називається умовою механічної рівноваги тіла. В цьому законі стверджується: тіло (матеріальна точка) буде знаходитись в стані механічної рівноваги тоді і тільки тоді, якщо векторна сума діючих на нього зовнішніх сил дорівнює нулю. Іншими словами: якщо ∑Fi=0 то v=0, або v=const і навпаки.
Зауваження. В науці загалом і в фізиці зокрема знак Σ (сигма) є знаком суми. Наприклад запис ΣFі=0 означає: векторна сума всіх діючих на тіло сил, від першої до останньої дорівнює нулю: ΣFі = F1+F2+ … +FN =0.
На практиці рівняння ∑Fi=0 записують у вигляді ∑Fx=0; ∑Fy=0. Це означає, що розв’язуючи задачі статики, вектори діючих на тіло сил (F) розкладають на проекції цих сил на осі заданої системи координат (Fx, Fy). При цьому рівняння ∑Fi=0 набуває вигляду ∑Fx=0; ∑Fy=0.
Задачі статики мають ту перевагу, що порядок (алгоритм) їх розв’язку є досить чітко визначеним. І цей порядок є наступним:
- На основі аналізу умови задачі виконують малюнок (обов’язково), на якому чітко вказують всі діючі на дане тіло (точку рівноваги) сили .
- Задають систему координат та вказують кутову орієнтацію сил в ній.
- Записують умову рівноваги тіла, тобто систему рівнянь: ∑Fx=0; ∑Fy=0.
- Розв’язавши цю систему, визначають невідомі величини.
Дотримуючись вище наведеного алгоритму розв’яжемо декілька конкретних задач.
Задача 1. На гнучких опорах, тіло масою 20кг підвішено так, як показано на малюнку (α=30º). Визначити реакції опор (зусилля в дротах 2 і 3).
Загальні зауваження. При розв’язуванні задач статики, діючу на абсолютно тверде тіло (в тому числі і гнучку опору) силу, можна переносити вздовж лінії дії цієї сили. Наприклад в умовах нашої задачі, діюча на тіло сила тяжіння, вздовж гнучкої опори 1, переноситься в точку дії трьох сил: Fт, N2, N3.
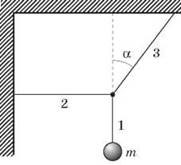
Дано:
m = 20кг
α = 30º
N2=?; N3=?
Рішення: Виконуємо малюнок, на якому вказуємо діючі на точку рівноваги сили та задаємо систему координат. Записуємо умову рівноваги системи.
∑Fx = –N2 + N3sin30º= 0
∑Fy = –FT + N3cos30º= 0.
Розв’язавши систему рівнянь, визначаємо невідомі величини:
із (2) → N3cos30º = Fт = mg; → N3 = mg/cos30º = 20∙10/0,87= 230H;
із (1) → N2 = N3sin30º = 230∙0,5= 115H.
Відповідь: N2 = 115H; N3 = 230H.
Задача 2. До кронштейну АВС в т.В підвішено вантаж масою 60кг, так як це показано на малюнку (α=30º). Визначити зусилля в стержнях АВ і СВ.
Загальні зауваження. В задачах статики, часто зустрічаються ситуації коли точний напрямок реакції опори невідомий або сумнівний. Наприклад, в нашій задачі стержень СВ явно «працює» на стиснення і тому його реакція NC має бути направленою вздовж лінії СВ в напрямку від точки С. Однак припустимо, що ви сумніваєтесь стосовно того в яку сторону направлена ця реакція. В такому випадку сміливо направляйте сумнівну реакцію в будь яку можливу сторону (вздовж лінії стержня) і розв’язуйте задачу. При цьому, якщо в результаті рішення задачі, невідома реакція матиме знак «+», то це означатиме, що вибраний вами напрямок є правильним. Якщо ж ця реакція виявиться зі знаком «–» то це означатиме, що в реальності відповідна реакція має протилежний (протилежний від вибраного) напрямок. Перевіряючи вище сказане направимо реакцію NС в гарантовано неправильному напрямку.
Дано:
m = 60кг
NА= ?; NС= ?
Рішення: Виконуємо малюнок на якому: вказуємо діючі на т.В сили; задаємо систему координат; вказуємо кутову орієнтацію сил. Оскільки кут α=30º безпосередньо не прилеглий до т.В, то із геометричних міркувань визначаємо йому відповідний та прилеглий до т.В кут. Записуємо умову рівноваги точки В і, розв’язавши систему відповідних рівнянь, визначаємо невідомі величини.
∑ Fx = –NA – NC sin30º = 0 (1)
∑ Fy = –NC cos30º – mg = 0 (2)
із (2)→ NC = –mg/cos30º = –(60∙10/0,87)= –690 Н
із (1)→ NA = –NCsin30º = – (–690)0,5 = 345 Н
Знак «–» вказує на те, що реакція NC фактично направлена в протилежну (протилежну від зображеної на малюнку) сторону.
Задача 3. Визначити реакції опори в зображеній на малюнку ситуації, якщо маса вантажу 20кг, а кут між стіною та стержнем ВС 30°.
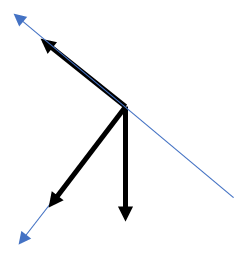
Загальні зауваження. Математична складова рішення задач статики визначальним чином залежить від того як задана система координат. Зазвичай, оптимальність введення системи координат полягає в тому, що бодай одна з осей цієї системи, має співпадати з напрямком невідомої сили. (В цьому випадку бодай одне з рівнянь умови рівноваги тіла, міститиме лише одну невідому величину, що значно полегшує математичне рішення системи рівнянь).
Дано:
m = 20кг
β = 30º
NА= ? NВ= ?
Рішення: Виконуємо малюнок на якому: вказуємо діючі на т.С сили; задаємо систему координат; вказуємо кутову орієнтацію сил. Записуємо умову рівноваги точки С.
∑ Fx = NA – mgsin30º = 0 (1)
∑ Fy = NB + mgcos30º = 0 (2)
із (1)→ NA = mgsin30º = 20∙10·0,50= 100 Н;
із (2)→ NB = – mgcos30º = = –20·10·0,87= –174 Н, де знак «–» вказує на те, що реакція NВ фактично направлена в протилежну (протилежну від зображеної на малюнку) сторону.
Задача 4. Куля масою 2кг розташована між двома площинами так, як зображено на малюнку. Визначити діючі на кулю реакції опори.
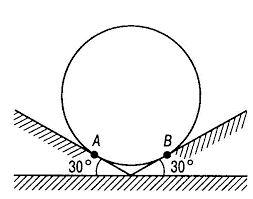
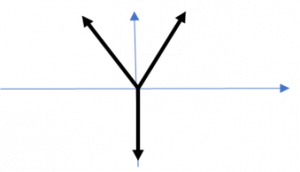
Загальні зауваження. 1) Із геометрії відомо, що дотична до кола є перпендикулярною до його радіусу, тобто до лінії яка проходить через центр кола. А оскільки плоска опора є дотичною до кола (кулі), то реакція опори завжди проходить через центр кола (сфери). 2) Зазвичай, оптимальність введення системи координат полягає в тому, що бодай одна з осей цієї системи, має співпадати з напрямком невідомої сили. Однак в деяких випадках, проблеми з визначенням кутів між силами та «оптимально» введеними осями координат, значно більші за ті проблеми які пов’язані з математичним рішенням системи рівнянь. Прикладом такого випадку є дана задача.
Дано:
m=2кг
NА=?; NВ=?
Рішення: Виконуємо малюнок на якому вказуємо всі діючі на кулю сили: Fт, NA, NB. А оскільки лінії дії цих сил перетинаються в центрі кулі, то саме цей центр буде як точкою прикладання всіх сил, так центром системи координат. Записуємо умову рівноваги кулі.
∑Fx= –NBsin30º + NAsin30º=0;
∑Fy= NBcos30º + NAcos30º – FT=0.
із (1) → NAsin30º = NBsin30º → NA = NB;
із (2) → 2NAcos30º = FT = mg; → NA=mg/2cos30º = 2∙10/2∙0,87=11,5H
Відповідь: NA=NB=11,5H.
Контрольні запитання.
- На що вказує факт того, що земні тіла падають з певним прискоренням?
- Яка сила тяжіння діє на зайця, вовка, ведмедя, носорога та слона, якщо їх маси відповідно дорівнюють 6кг; 40кг; 400кг; 2т; 4т?
- Що називають опорою?
- В якому напрямку протидіє переміщенню тіла: а) плоска опора; б) гнучку опора; в) шарнірно закріплений стержень?
- Що називають реакцією опори? В чому вимірюється реакція опори?
- Як називається основний закон статики? Що стверджується в цьому законі?
- Який алгоритм (порядок) розв’язування задач статики?
- В результаті правильного рішення задачі, реакція опори отримала знак «–». Що це означає?
- Що означає твердження: оптимальним чином вводимо систему координат?
- Як направлена реакція опори площини відносно тієї кулі, що знаходиться на цій площині?
Вправа 9.
- Тіло масою 8кг лежить на горизонтальній поверхні. Визначте діючі на тіло сили.
- Визначте реакції опори в зображених на малюнках а) і б) ситуаціях. Маса вантажу в обох випадках 3кг.
а)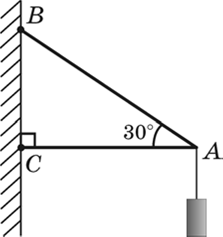 б)
б)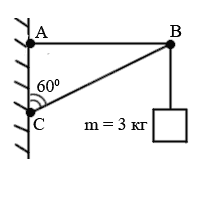
- Визначити реакції опори в зображеній на малюнку ситуації, якщо маса вантажу 30кг, α=45º, β=135°.
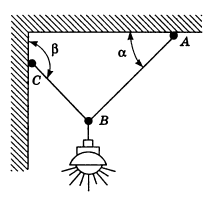
- Визначити зусилля в стержнях, якщо діюча на точку А сила 100 Н.
- На двох тросах однакової довжини висить вантаж масою 50кг. При цьому кут між тросами 60º. Визначити сили натягу тросів.
- Куля масою 30кг знаходиться між двома взаємно перпендикулярними площинами (дивись мал.). Визначити діючі на кулю реакції опори.
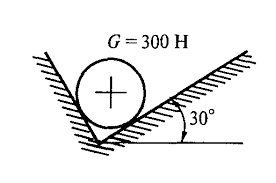
- На прикріпленій до вертикальної стіни нитці висить куля масою 2кг. Визначити силу натягу нитки та силу тиску кулі на стіну, якщо кут між ниткою та стіною 30°. Тертям між кулею та стіною знехтувати.
.
Лекційне заняття №10. Тема: Сила тертя. Силовий метод розв’язування задач статики.
В механіці, сили які так чи інакше протидіють взаємному переміщенню контактуючих поверхонь, називають силами тертя. По суті, сила тертя є результуючою багатьох силових факторів, різноманіття яких не можливо врахувати. Про складність того, що прийнято називати тертям, говорить бодай той факт, що на сьогоднішній день точної кількісної теорії тертя не існує. А це означає що по-перше, не існує тієї єдиної універсальної формули, яка б дозволяла визначати силу тертя в будь якій можливій ситуації. По-друге, ті формули за якими натепер визначають силу тертя в тому чи іншому конкретному випадку, є в тій чи іншій мірі наближеними. Відображенням цієї наближеності є факт того. По-третє, в наявних визначальних рівняннях сил тертя, завжди присутні величини значення яких визначається експериментально (коефіцієнти тертя) і які є індивідуальним для кожного конкретного випадку.
Розрізняють дві основні різновидності тертя: сухе і в’язке. Сухим називають таке тертя, яке виникає при взаємодії твердих поверхонь і яке протидіє їх взаємному переміщенню. В’язким називають таке тертя, яке виникає при взаємодії твердих поверхонь з рідинами або газами, а також між внутрішніми шарами цих середовищ, і яке протидіє їх взаємному переміщенню. Наприклад те тертя яке протидіє взаємному переміщенню двох твердих сухих поверхонь, є сухим. Якщо ж між цими поверхнями знаходиться шар мастила (рідини), то відповідне тертя буде в’язким. А оскільки ви знаєте, що для зменшення тертя застосовують певні рідини які називають мастилами, то напевно погодитесь з тим, що за однакових умов, в’язке тертя значно менше за сухе.
В свою чергу, сухе тертя прийнято розділяти на тертя ковзання та тертя кочення. Наприклад, якщо важкий предмет ви намагаєтесь зсунути відносно підлоги, то вам протидіє сила тертя ковзання (мал.37а). А якщо той же предмет стоятиме на платформі з коліщатами (мал.37б), то переміщенню цієї системи протидіятиме сила тертя кочення. І напевно ви знаєте, що за схожих умов, тертя кочення значно менше за тертя ковзання.
Мал.37. Тертя яке виникає між твердими поверхнями прийнято розділяти на тертя ковзання (а) та тертя кочення (б).
В межах програми загальноосвітньої школи, говорячи про силу тертя, зазвичай мають на увазі силу тертя ковзання. Сила тертя (сила тертя ковзання) – це та сила, з якою поверхні взаємодіючих твердих тіл протидіють їх взаємному поступальному (ковзальному) переміщенню, або можливості такого переміщення і яка дорівнює добутку коефіцієнту тертя ковзання (μ) та тієї сили з якою взаємодіючі поверхні тиснуть одна на одну (реакції опори N)
Позначається: Fтер
Визначальне рівняння: Fтер =µN
Одиниця вимірювання: [Fтер] = Н, ньютон.
Коефіцієнт тертя ковзання – це фізична величина, яка характеризує здатність певної пари твердих поверхонь протидіяти їх відносному ковзальному переміщенню і яка дорівнює відношенню виникаючої між цими поверхнями сили тертя, до величини тієї сили з якою поверхні притискаються одна до одної.
Позначається: μ
Визначальне рівняння: μ = Fтер/N
Одиниця вимірювання: [μ] = Н/Н = – , безрозмірна величина.
Коефіцієнт тертя складним чином залежить від багатьох обставин і визначається експериментально. Результати деяких з цих експериментальних досліджень представлені в наступній таблиці.
|
Сила тертя завжди направлена в сторону протилежну від напрямку руху тіла, або напрямку його можливого руху. Наприклад, якщо тіло рухається вправо, то сила тертя направлена вліво, а якщо тіло рухається вліво, то сила тертя направлена вправо. Якщо певна зовнішня сила F прагне зсунути тіло в одному напрямку (мал.38а), а тіло залишається в стані спокою (v=0), то це тільки тому, що на дане тіло в протилежному напрямку діє відповідна сила тертя Fтер. Якщо в супереч дії тих сил які прагнуть зсунути тіло похилою поверхнею (мал.38б), тіло залишається в стані спокою, то це тільки тому, що в напрямку протилежному до напрямку можливого руху на тіла діє відповідна сила тертя, яка і протидіє цьому можливому руху.
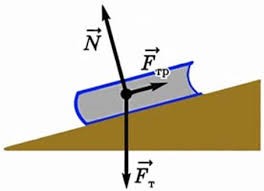
Мал.38. Сила тертя завжди направлена в сторону протилежну від напрямку руху тіла, або напрямку його можливого руху.
Специфіка сили тертя полягає в тому, що вона виникає як певна реакція на дію тих сил які намагаються зсунути одну поверхню відносно іншої. І якщо такі сили відсутні, то відповідно відсутня і певна сили тертя. Наприклад, якщо тіло знаходиться на горизонтальній поверхні (мал.39а), то на нього сила тертя не діє. Не діє тому, що нема того силового фактору який намагається зсунути тіло відносно поверхні (Fт+N=0). Однак як тільки поверхня стане похилою (мал.39б), автоматично з’явиться і відповідна сила тертя. З’явиться тому, що результуюча постійно діючих на тіло сил (сила тяжіння Fт та реакція опори N) вже не буде дорівнювати нулю (Fт+N≠0) і намагатиметься зсунути тіло вниз. І якщо тіло знаходиться в стані спокою, то це тільки тому, що цей спокій забезпечує певна сила тертя. При цьому, по мірі зростання кута нахилу площини, автоматично зростатиме і відповідна сила тертя. Зростатиме до тих пір, поки не досягне певної критичної величини, за межами якої, тертя спокою перетворюється на тертя руху.
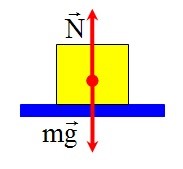
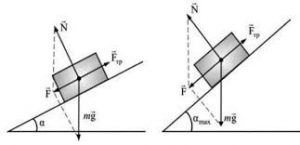
Мал.39. Сила тертя виникає лише за наявності тієї сили яка прагне зсунути тіло відносно поверхні.
На перший погляд, та сила тертя завдяки якій люди, велосипеди та автомобілі переміщуються відносно відповідних поверхонь, не вписується в рамки загально прийнятого визначення: «сила тертя, це та сила з якою взаємодіючі поверхні протидіють їх взаємному переміщенню». Однак, неупереджений аналіз вказує на безпідставність подібних звинувачень. Адже та сила тертя ковзання, що виникає між дорогою і ведучими колесами велосипедів та автомобілів (тобто тими колесами обертання яких спричиняє поступальний рух відповідного транспортного засобу),
між дорогою і підошвами взуття, дійсно протидіє їх взаємному переміщенню, тобто протидіє ковзанню коліс та підошви, відносно поверхні дороги. При цьому ця сила не протидіє поступальному руху відповідних тіл. Більше того, без цієї сили такий рух стає просто неможливим. Адже лише завдяки силі тертя ковзання, обертальний рух ведучого колеса велосипеда та м’язові зусилля пішохода перетворюється на поступальний рух відповідних тіл.

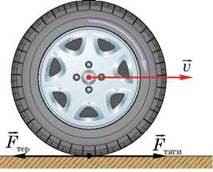
Мал.40. Наявність сили тертя, є необхідною умовою поступального руху тіл.
Нагадаємо, суть силового методу розв’язування задач полягає в тому, що невідомі величини визначають на основі векторного аналізу діючих на тіло сил та на базі умови його механічної рівноваги: якщо v=0 або v=const то ∑F=0, або в проекціях на осі системи координат ΣFx=0; ΣFy=0. По суті це означає, що силовий розв’язку задач має чітко визначений порядок дій. І цей порядок є наступним:
- На основі аналізу умови задачі виконують малюнок (обов’язково), на якому чітко вказують всі діючі на дане тіло (точку рівноваги) сили .
- Задають систему координат та вказують кутову орієнтацію сил в ній.
- Записують умову рівноваги тіла, тобто систему рівнянь: ∑Fx=0; ∑Fy=0.
- Розв’язавши цю систему, визначають невідомі величини.
Загальні зауваження. В механіці матеріальної точки, а саме таку механіку ми і вивчаємо, прийнято вважати, що всі діючі на тіло сили, діють на його центр мас. Тому, якщо в умові задачі нема конкретних вказівок щодо точки прикладання конкретної сили, вважається що ця сила діє на цент мас відповідного тіла.
Дотримуючись вище наведеного алгоритму та зважаючи на зроблене зауваження, розв’яжемо декілька конкретних задач.
Задача 1. Для того щоб зрушити з місця тіло масою 40кг потрібно прикласти горизонтальну силу 200Н. Визначити коефіцієнт тертя.
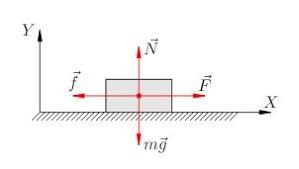
Дано:
m = 40кг
F = 200Н
μ = ?
Рішення: Виконуємо малюнок на якому вказуємо всі діючі на тіло сили та задаємо відповідну систему координат. (на малюнку Fтер позначено ƒ) Записуємо умову механічної рівноваги даного тіла:
1) ∑Fx = F – Fтер = F – μN = 0;
2) ∑Fy = N – Fт = N – mg.
Із (2) випливає N = mg.= 40кг·10м/с2 = 400Н.
Із (1) випливає F = μN, звідси μ = F/N = 200Н/400Н = 0,5.
Відповідь: μ = 0,5.
Задача 2. Тіло масою 10кг знаходиться в стані механічного спокою на похилій площині. Визначити величину діючої на тіло сили тертя та коефіцієнт тертя, якщо кут нахилу площини до лінії горизонту 30°.
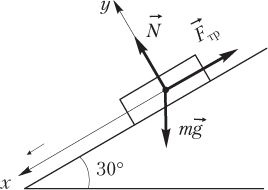
Дано:
m = 10кг
α =30°
Fтер = ?; μ = ?
Рішення: Виконуємо малюнок на якому: вказуємо діючі на тіло (на центр мас тіла) сили; задаємо систему координат; вказуємо кутову орієнтацію сил (кут між напрямком сили тяжіння та віссю 0у, визначаємо із геометричних міркувань, а згідно з цими міркуваннями, цей кут дорівнює куту нахилу площини α=30°). Записуємо умову рівноваги тіла і, розв’язавши систему відповідних рівнянь, визначаємо невідомі величини. (Fт = mg = 10кг·10м/с2 =100H).
∑ Fx = –Fтер + Fт sinα = 0 (1)
∑ Fy = N – Fт cosα = 0 (2).
Із (1) → Fтер = Fт sinα .
Із (2) → N = Fт cosα .
Розрахунки: Fтер = 100∙0,5 = 50Н
. N = 100∙0,87 = 87H
Оскільки за визначенням μ = Fтер/N, то μ =50Н/87Н = 0,57
Відповідь: N = 87H; Fтер = 50H; μ = 0,57.
Задача 3. З якою мінімальною силою потрібно притиснути книгу масою 0,8кг до вертикальної стіни, щоб книга не зісковзувала вниз? Коефіцієнт тертя між книгою та стіною 0,4.
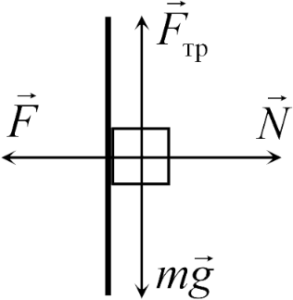
Дано:
m=0,8кг
μ = 0,4
F = ?
Рішення: Виконуємо малюнок на якому вказуємо всі діючі на тіло сили та задаємо відповідну систему координат. Записуємо умову рівноваги даного тіла:
ΣFx = N – F = 0;
ΣFy = Fтер – Fт = μN – mg = 0.
Із рівняння (1) випливає F = N, де N=?
Із рівняння (2) випливає μN = mg, звідси N = mg/μ.
Таким чином F = N = mg/μ = 0,8кг·9,8(м/с2)/0,4 = 19,8Н
Відповідь: F = 19,8Н.
Задача 4. Визначити силу тяги, яку розвиває тепловоз при рівномірному русі на горизонтальній ділянці шляху, якщо коефіцієнт тертя 0,03, а сила тиску на рейки 25∙106Н?
Загальні зауваження. При розв’язуванні задач фізики, надзвичайно важливим вмінням, є вміння виділяти суттєве (важливе) і не звертати особливу увагу на несуттєве (другорядне, неважливе). Наприклад в умовах даної задачі неважливо чи знаєте ви як влаштований тепловоз і як він створює ту силу яка називається силою тяги. Неважливо скільки коліс в цьому тепловозі і яким чином вони взаємодіють з рейками залізниці. Важливим є те, що на певній горизонтальній поверхні (опорі), є певне тіло, яке під дією певної горизонтальної сили (сили тяги Fтяги) з певною вертикальною силою (силою тиску Fт, а по суті силою тяжіння) діє на опору (рейки залізниці). Важливим є те, що руху тіла протидіє певна узагальнена сила тертя (сила протидії руху тепловоза), основною характеристикою якої є відповідний коефіцієнт тертя. Важливим є те, що тепловоз рухається з певною постійною швидкістю (v=const), бо це означає, що дана задача є задачею статики і що тому мають виконуватись співвідношення: ∑Fx=0; ∑Fy=0. Власне таке розуміння суті задачі і дозволяє отримати відповідне рішення.
Дано: Рішення:
μ = 0,03 Виконуємо малюнок на якому вказуємо всі діючі на
Fт = 25·106Н тіло сили та задаємо відповідну систему координат.
Fтяги= ?
Рішення: Виконуємо малюнок на якому вказуємо всі діючі на тіло сили та задаємо відповідну систему координат. (на малюнку Fтяги позн. F; Fт позн. mg; Fтер позн. ƒ). Записуємо умову рівноваги даного тіла:
ΣFx = Fтяги – Fтер = Fтяги – μN = 0;
ΣFy = N – Fт = 0.
Із рівняння (1) випливає Fтяги = μN, де N=?
Із рівняння (2) випливає N = Fт = 25·106Н .
Таким чином Fтяги = μN = 0,03·25·106Н = 0,75·106Н = 750кН
Відповідь: F = 750кН.
Задача 5. Тіло масою 15кг знаходиться на похилій площині, кут нахилу якої до горизонту 30°. Яку направлену вздовж площини силу треба прикласти до тіла, щоб воно піднімалось вгору з постійною швидкістю? Коефіцієнт тертя 0,35.
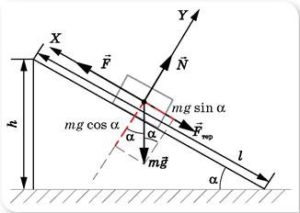
Дано:
m = 15кг
α = 30°
v = const
μ = 0,35
F = ?
Рішення: Виконуємо малюнок на якому вказуємо всі діючі на тіло сили; задаємо систему координат; вказуємо кутову орієнтацію сил (кут між силою тяжіння та віссю 0у ( α=30°) визначаємо із геометричних міркувань). Записуємо умову механічної рівноваги тіла. Розв’язавши систему відповідних рівнянь, визначаємо невідому величину.
∑Fx = F – Fтsinα – Fтер = F – mgsin30° – μN = 0;
∑Fy = N – Fтcosα = N – mgcos30° = 0.
Із рівняння (2) випливає N = mgcos30° = 15кг10(м/с2)0,87 = 130Н,
Із рівняння (1) випливає F = mgsin30° + μN = 15кг·10(м/с2)0,5 + 0,35·130Н = 120Н.
Відповідь: F = 120Н.
Задача 6. Тіло масою 50кг за допомогою мотузки яка утворює кут 30° з горизонтом, рівномірно тягнуть горизонтальною поверхнею. Яку силу прикладають при цьому, якщо коефіцієнт тертя 0,25?
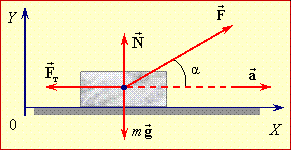
Дано:
m = 50кг
α = 30°
v = const
μ = 0,25
F = ?
Рішення: Виконуємо малюнок на якому вказуємо всі діючі на тіло сили; задаємо систему координат; вказуємо кутову орієнтацію сил. Записуємо умову механічної рівноваги тіла. Розв’язавши систему відповідних рівнянь, визначаємо невідому величину.
∑Fx = Fcosα – Fтер = Fcos30° – μN = 0;
∑Fy = N + Fsinα – Fт = N + Fsin30° – mg = 0.
Таким чином, ми маємо систему двох рівнянь з двома невідомими (F, N). Порядок розв’язку таких систем загально відомий. Одну з невідомих визначають з одного рівняння і отриманий результат підставляють у друге рівняння. При цьому отримують рівняння з одним невідомим. Наприклад в умовах нашої задачі, із рівняння (1) визначаємо реакцію опори (N), а отриманий результат підставляємо в рівняння (2).
Із рівняння (1) випливає N = Fcos30°/μ.
Отриманий результат підставляємо в рівняння (2), при цьому:
Fcos30°/μ + Fsin30° – mg = F(cos30°/μ + sin30°) – mg = 0, звідси
F = mg/(cos30°/μ + sin30°).
Розрахунки: F = mg/(cos30°/μ + sin30°) = 50кг10(м/с2)/(0,87/0,25 + 0,5) = 125Н.
Відповідь: F = 125Н.
Задача 7. На столі лежать один на одному чотири однакові бруски. При цьому нижній брусок жорстко прикріплений до столу. В якому випадку треба прикласти більшу силу: щоб зрушити три верхні бруски разом, чи щоб витягти другий брусок зверху, притримуючи решту?
Рішення.
Як в першому так і в другому випадку переміщенню брусків протидіє сила тертя, величина якої визначається за формулою F=μN. Оскільки бруски однакові, то в обох випадках коефіцієнт тертя (μ) є однаковим. Якщо ж говорити про реакцію опори (N), а по суті про ту силу з якою контактуючі поверхні притискаються одна до одної, то в першому випадку (переміщують три бруски) N1 = 3mg, де m – маса одного бруска. В другому ж випадку N2 = mg + 2mg = 3mg. Адже на верхню поверхню другого бруска тисне сила mg, а його нижня поверхня притискається до поверхні третього бруска з силою 2mg. Таким чином F1 = μ3mg, F2 = μ3mg.
Відповідь: Зусилля в обох випадках будуть однаковими.
Контрольні запитання.
- Яке тертя називають сухим, а яке в’язким? Яке з них є більшим?
- Що називають силою тертя (тертя ковзання)? Від чого залежить сила тертя ковзання? Як направлена сила тертя ковзання?
- Що називають коефіцієнтом тертя? Від чого залежить коефіцієнт тертя і як він визначається?
- Чому на те тіло яке лежить на горизонтальній поверхні стола, сила тертя не діє, а на те що лежить на похилій площині – діє?
- В процесі аварійного гальмування, задні колеса автомобіля не обертаються, а передні вільно обертаються. Які сили тертя діють на ці колеса? Яка з цих сил є більшою?
- Назвіть основні способи суттєвого зменшення сили тертя.
- Які сили тертя діють на автомобіль в процесі його руху? Які з цих сил протидіють руху автомобіля, а які сприяють цьому руху?
- Іноді визначальне рівняння сили тертя записують у вигляді Fтер= µN або Fтер = –µN. Чи є такий запис правильним? Чому?
- Який алгоритм силового методу розв’язування задач статики?
Вправа 10.
- Для того щоб зрушити з місця тіло масою 40кг потрібно прикласти горизонтальну силу 200Н. Визначити коефіцієнт тертя.
- Тіло масою 5кг знаходиться в стані механічного спокою на похилій площині. Визначити величину діючої на тіло сили тертя та коефіцієнт тертя, якщо кут нахилу площини до лінії горизонту 30°.
- Яку силу треба прикласти до тіла масою 7кг, щоб воно рівномірно рухалось похилою поверхнею, кут нахилу якої до лінії горизонту 30°? Коефіцієнт тертя між тілом та поверхнею 0,5.
- З якою силою потрібно притиснути книгу масою 0,5кг до вертикальної стіни, щоб книга не зісковзувала вниз? Коефіцієнт тертя між книгою та стіною 0,45.
- Визначити силу тяги, яку розвиває тепловоз при рівномірному русі по горизонтальному шляху, якщо коефіцієнт тертя 0,03, а сила тиску на рейки 25∙106Н.
- На столі лежить стоса однакових книг. Що легше: зсунути шість верхніх книг, чи витягнути з стоси третю книгу притримуючи решту?
- Коефіцієнт тертя ковзання ящика масою 100кг об підлогу 0,3. Ящик тягнуть за мотузку, що утворює кут 45º з горизонтом. Яку силу треба прикласти, щоб ящик рухався рівномірно?
- На двох тросах однакової довжини висить вантаж масою 10кг. При цьому кут між тросами 90º. Визначити сили натягу тросів.
- Куля масою m і радіусом R підвішена на нитці довжиною ℓ до гладенької вертикальної стіни. Визначити силу натягу нитки та силу тиску кулі на стіну (тертям між кулею та стіною знехтувати).
.
Лекційне заняття №11. Тема: Сила інерції. Силовий метод розв’язування задач динаміки.
Вивчаючи фізику ви неминуче переконаєтесь в тому, наскільки незамінно важливою є та сила, яку прийнято називати силою інерції. Сила, без розуміння суті якої не можливо логічно пояснити величезний пласт явищ. Не можливо пояснити чому різні тіла падають з однаковим прискореннями; чому тіла рухаються за інерцією; чому Земля розтягнута в екваторіальній площині; чому Місяць не падає на Землю, а Земля не падає на Сонце; чому планети Сонячної системи знаходяться практично в одній площині; чому в процесі вертикального прискореного руху системи опора-тіло, вага тіла в залежності від напрямку та величини прискорення може бути різною; чому в кабіні штучного супутника Землі, тіла перебувають в станів невагомості і що представляє собою цей стан; чим сила тяжіння (Fт=mg) відрізняється від сили гравітаційної взаємодії (Fгр= GMm/R2) і чому в загальному випадку сила тяжіння не проходить через центр маси Землі. І таких «чому?» незліченна кількість.
З’ясовуючи фізичну суть сили інерції, звернемося до експерименту. Припустимо що до пружинного динамометра (мал.41) прикріплено вантаж масою 0,102кг. Коли система динамометр-вантаж знаходиться в стані механічної рівноваги (v=0 або v=const) то деформована пружина вказує на те, що вантаж притягується до Землі з силою 1Н: Fт=mg=0,102кг·9,8м/с2=1Н. Але, як тільки система почне прискорено рухатись вгору, пружина динамометра додатково розтягнеться, вказуючи на те, що на тіло діє певна додаткова сила, напрям якої протилежний до напрямку прискорення. Ця сила і є силою інерції .
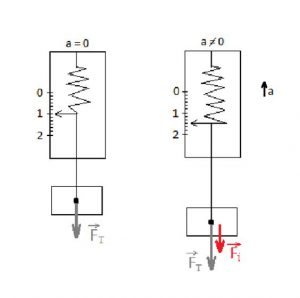
Мал.41. Прискорений рух тіла завжди породжує силу, яка протидіє появі та зростанню цього прискорення і яка називається силою інерції
Сила інерції – це така сила, поява якої обумовлена прискореним рухом тіла і яка завжди протидіє появі та зростанню цього прискорення.
Позначається: Fі
Визначальне рівняння: Fі = –ma
Одиниця вимірювання: [Fі] = Н, ньютон.
Подібно до того як сила тертя протидіє переміщенню контактуючих поверхонь, як сила пружності протидіє пружній деформації тіла, сила інерції протидіє прискореному руху тіла. А це означає, що як тільки тіло починає рухатись з певним прискоренням, автоматично з’являється сила інерції напрям якої протилежний до напрямку прискорення. Наприклад якщо в момент розгону, прискорення ракети направлено вгору, то діюча на ракету сила інерції направлена вниз. Якщо в процесі вільного падіння прискорення тіла направлено вниз, то діюча на тіло сила інерції направлена вгору. Якщо в процесі гальмування прискорення автомобіля направлено назад (в сторону протилежну від напрямку руху), то діюча на автомобіль сила інерції буде направлена вперед. Якщо в процесі обертання навколо Землі, Місяць рухається з доцентровим прискоренням, то діюча на нього сила інерції є відцентровою. Якщо прискорення тіла направлено вправо, то діюча на тіло сила інерції направлена вліво. Якщо прискорення вліво – сила інерції вправо, прискорення вперед – сила інерції назад і т.д.
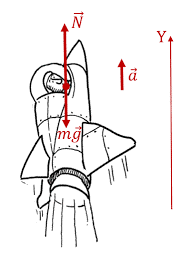
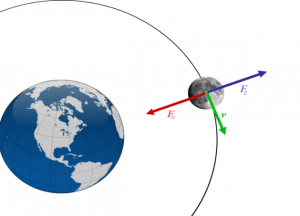


Мал.42. Якщо тіло рухається з прискоренням, то на нього неминуче діє певна сила інерції, направлена в сторону протилежну від напрямку прискорення.
В певному сенсі, сила інерції не вписується в рамки загальноприйнятого визначення: «Сила – це міра взаємодії фізичних об’єктів». Не вписується головним чином тому, що наші уявлення про простір-час є примітивно спрощеними і такими, що не вважають простір-час певним матеріальним об’єктом. На цій підставі часто можна почути тезу про те, що сила інерції, це якась неіснуюча, придумана, віртуальна сили. Подібні твердження – абсолютно безпідставні. Вся «не реальність», «надуманість», «віртуальність» сили інерції, полягає лише в одному – в нашому суб’єктивному, примітивно-спрощеному розумінні того, що називається простір-час. В уявленнях про те, що простір-час, це така собі безкінечна, безструктурна, вічна пустота, яка не має жодних властивостей, окрім властивості бути тією безкінечною, безструктурною, вічною пустотою, в якій знаходиться певна сукупність матеріальних об’єктів та відбуваються певні події.
Об’єктивний же аналіз нескінченної кількості фактів безумовно доводить, що простір-час, це надзвичайно складний, багатогранний, багатофункціональний фізичний об’єкт, параметри та властивості якого, певним чином залежать від тих речовинних об’єктів які знаходяться в цьому просторі-часі, та тих подій (рухів) які відбуваються в ньому. Проявами ж цих властивостей є гравітаційні, електричні та магнітні поля, електромагнітні та гравітаційні хвилі, видиме світло, інфрачервоне, ультрафіолетове, рентгенівське та гама випромінювання, тощо. Тому коли хтось стверджує, що не існує того фізичного об’єкту який є джерелом сили інерції, то по суті заперечує факт реальності гравітаційних та електромагнітних полів, факт реальності електромагнітних хвиль, реальності радіо, телебачення та всього того, що утворює сучасну інформаційну цивілізацію. Бо всі ці поля і всі ці хвилі, то ж не що інше, як певні силові збурення того фізичного об’єкту який називається простором-часом.
Чи задумувались ви над тим, чому тіла різної маси падають однаково швидко? Адже на більш масивне тіло діє більша сила тяжіння, яка очевидно мала б надавати йому більшої швидкості падіння. І тим не менше, важкий камінь і легка пісчинка падають однаково швидко, а точніше – з однаковим прискоренням. Даний факт можна пояснити лише на основі розуміння фізичної суті сили інерції.
Дійсно. Пояснюючи факт того, що за відсутності (не суттєвості) опору повітря, всі земні тіла падають з однаковим прискоренням (прискоренням вільного падіння g), можна сказати наступне. На будь-яке тіло діє певна сила тяжіння (мал.52). При цьому, на важке тіло, діє велика сила тяжіння (Fт=Mg), а на легке – відповідно мала (Fт=mg). В процесі того, як під дією сили тяжіння (Fт=mg) тіло набуває відповідного прискорення (а=Fт/m=mg/m=g), на нього починає діяти відповідна протидіюча сила – сила інерції (Fi= –ma= –mg). При цьому, на важке тіло діє велика сина інерції (Fі = –Mg), а на легке – мала сила інерції (Fі = –mg). Під дією цих рівних за величиною і протилежних за напрямком сил (сили тяжіння та сили інерції) будь-яке вільно падаюче тіло і рухається з певним постійним прискоренням – прискоренням вільного падіння.

Мал.43. Важкі і легкі тіла падають з однаковим прискоренням тому, що в процесі вільного падіння, діючі на них сили тяжіння динамічно зрівноважуються відповідними силами інерції.
Ви можете запитати: «А як бути з умовою рівноваги тіла, тобто з законом в якому говориться про те, що коли діючі та тіло зовнішні сили зрівноважують одна одну, то тіло знаходиться в стані спокою (v=0), або прямолінійного рівномірного руху (v=const)?» Відповідаючи на це слушне запитання, можна сказати наступне.
Дійсно. В умові механічної рівноваги тіла стверджується: якщо векторна сума діючих на тіло зовнішніх сил дорівнює нулю, то тіло буде знаходитись в стані механічної рівноваги. Іншими словами: якщо ΣF=0, то v=0 або v=const. Аналізуючи дане твердження зверніть увагу на те, що в ньому говориться про векторну суму зовнішніх сил, тобто звичайних сил взаємодії: сила тяжіння, сила тертя, сила пружності, сила Архімеда, реакція опори, сила тяги, тощо. В нашому ж випадку, ми маємо справу з силою інерції, тобто силою яка не є зовнішньою. З силою, поява якої обумовлена не взаємодією тіла з тими чи іншими речовинними об’єктами, а самим фактом прискореного руху тіла. Тому, коли ми стверджуємо що в процесі вільного падіння тіла, встановлюється рівновага між силою тяжіння і силою інерції, то маємо на увазі так звану динамічну рівновагу, тобто таку рівновагу яка передбачає рух тіла не з постійною швидкістю (v=const), а з постійним прискоренням (а=const).
Динамічною рівновагою називають такий механічний стан тіла, при якому воно, під дією зовнішніх сил та сили інерції, знаходиться в стані рівноприскореного руху (а=const).
Потрібно зауважити, що ті задачі, в яких тіло під дією певної системи сил рухається з постійним прискоренням є задачами динаміки. Однак, алгоритм рішення цих динамічних задач практично не відрізняється від алгоритму рішення задач статики. В основі цього рішення лежить твердження (закон) яке називається умовою динамічної рівноваги тіла. Тіло (матеріальна точка) буде знаходитись в стані динамічної рівноваги (а=const) тоді і тільки тоді, коли векторна сума діючих на нього зовнішніх сил та сили інерції дорівнює нулю. Іншими словами:
якщо Σ F + Fi = 0, то а=const і навпаки: якщо а=const, то ΣF+Fi = 0.
Фізика загалом і механіка зокрема, це єдиний цілісний організм всі частини якого, взаємопов’язані та взаємопереплетені. Тому, коли ми ділимо механіку на кінематику, статику та динаміку, то робимо це досить умовно. Скажімо, на даний момент ми вивчаємо тему, яка називається «статика», тобто ту тему в якій вивчають параметри, закономірності та причини стану механічної рівноваги тіл (v=0 або v=const). В цій темі основною фізичною величиною є сила, а основним законом – умова механічної рівноваги тіла.
З іншого боку, однією з найважливіших сил механіки є сила інерції, тобто та сила, поява якої обумовлена прискореним рухом тіла. Формально, ті задачі в яких тіло під дією певної системи сил рухається з прискоренням, є задачами динаміки. Однак ці силові задачі динаміки є органічним продовженням та доповненням задач статики. По суті, мова йде про пласт фактично одних і тих же задач. І розв’язувати ці задачі у відриві одна від одної є не доцільним та методологічно не правильним. Тому ті ситуації, в яких тіло під дією певної системи сил рухається з прискоренням, ми будемо розглядати не лише в динаміці, а й в статиці.
Загалом є два базові методи розв’язування задач динаміки: силовий та імпульсно-енергетичний. Про суть та можливості імпульсно-енергетичного методу ми поговоримо в найближчому майбутньому. Наразі ж, мова піде про силовий метод розв’язування задач динаміки. Суть цього методу дуже проста: на основі аналізу діючих на тіло сил (втому числі і сили інерції), та на базі умови його динамічної рівноваги (якщо а=const, то ∑F+Fi=0) визначаються невідомі величини. За такого підходу задачі динаміки (а≠0), стають абсолютними аналогами задач статики (а=0). А це означає, що ці задачі розв’язуються за універсальним, чітко визначеним алгоритмом:
- Виконуємо малюнок, на якому вказуємо всі діючі на тіло сили, в тому числі і силу інерції.
- Задаємо систему координат та вказуємо кутові орієнтації сил.
- Записуємо відповідну малюнку систему рівнянь, які відповідають умові динамічної рівноваги тіла (∑F+Fi=0): ∑Fx = 0; ∑Fy = 0.
- Розв’язавши наявну систему рівнянь, визначаємо невідомі величини.
Ілюструючи суть та можливості вище описаного силового методу розв’язування задач динаміки, розглянемо декілька конкретних прикладів. (Відразу ж зауважу, що віднайти малюнок з позначеною на ньому силою інерції практично не можливо. Тому в графічних поясненнях до задач, зображення сили інерції відсутнє).
Фізика загалом і механіка зокрема, це єдиний цілісний організм всі частини якого, взаємопов’язані та взаємопереплетені. Тому, коли ми ділимо механіку на кінематику, статику та динаміку, то робимо це досить умовно. Скажімо, на даний момент ми вивчаємо тему, яка називається «статика», тобто ту тему в якій вивчають параметри, закономірності та причини стану механічної рівноваги тіл (v=0 або v=const). В цій темі основною фізичною величиною є сила, а основним законом – умова механічної рівноваги тіла.
З іншого боку, однією з найважливіших сил механіки є сила інерції, тобто та сила, поява якої обумовлена прискореним рухом тіла. Формально, ті задачі в яких тіло під дією певної системи сил рухається з прискоренням, є задачами динаміки. Однак ці силові задачі динаміки є органічним продовженням та доповненням задач статики. По суті, мова йде про пласт фактично одних і тих же задач. І розв’язувати ці задачі у відриві одна від одної є не доцільним та методологічно не правильним. Тому ті ситуації, в яких тіло під дією певної системи сил рухається з прискоренням, ми будемо розглядати не лише в динаміці, а й в статиці.
За великим рахунком є два базові методи розв’язування задач динаміки: силовий та імпульсно-енергетичний. Про суть та можливості імпульсно-енергетичного методу ми поговоримо в найближчому майбутньому. Наразі ж, мова піде про силовий метод розв’язування задач динаміки. Суть цього методу дуже проста: на основі аналізу діючих на тіло сил (втому числі і сили інерції), та на базі умови його динамічної рівноваги (якщо а=const, то ∑F+Fi=0) визначаються невідомі величини. За такого підходу задачі динаміки (а≠0), стають абсолютними аналогами задач статики (а=0). А це означає, що ці задачі розв’язуються за універсальним, чітко визначеним алгоритмом:
- Виконуємо малюнок, на якому вказуємо всі діючі на тіло сили, в тому числі і силу інерції.
- Задаємо систему координат та вказуємо кутові орієнтації сил.
- Записуємо відповідну малюнку систему рівнянь, які відповідають умові динамічної рівноваги тіла (∑F+Fi=0): ∑Fx = 0; ∑Fy = 0.
- Розв’язавши наявну систему рівнянь, визначаємо невідомі величини.
Ілюструючи суть та можливості вище описаного силового методу розв’язування задач динаміки, розглянемо декілька конкретних прикладів. (Відразу ж зауважу, що віднайти малюнок з позначеною на ньому силою інерції практично не можливо. Тому в графічних поясненнях до задач, зображення сили інерції зазвичай відсутнє).
Задача 1. Автомобіль масою 900кг, маючи тягову силу 2кН, рухається з прискоренням 1м/с2. Визначити загальну силу опору руху автомобіля (загальну силу тертя).
Дано:
m = 900кг
Fтяги = 2кН = 2000Н
a = 1м/с2
Fтер = ?
Рішення: Виконуємо малюнок на якому вказуємо всі діючі на автомобіль сили в тому числі і направлену в протилежну сторону від прискорення, силу інерції. Задаємо відповідну систему координат.
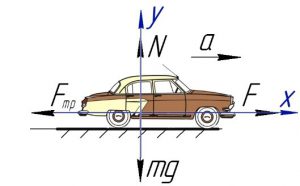
Записуємо умову рівноваги тіла вздовж осі 0х:
ΣFx = Fтяги – Fтер – Fi = Fтяги – Fтер – mа = 0. Звідси випливає Fтер = Fтяги – mа.
Розрахунки: Fтер = 2000Н – 900кг1м/с2 = 2000Н – 900Н = 1100Н
Відповідь: Fтер = 1100Н.
Задача 2. Автомобіль масою 2т проходить по опуклому мосту з радіусом кривизни 40м зі швидкістю 36км/год. З якою силою автомобіль тисне на середину моста?
Дано:
m = 2т = 2·103кг
R = 40м
v = 36км/год = 10м/с
P = ?
Рішення: Оскільки та сила з якою автомобіль тисне на опору (міст), чисельно дорівнює тій силі з якою опора тисне на автомобіль (реакція опори N), то рішення задачі зводиться до визначення діючої на автомобіль реакції опори. Визначаючи цю реакцію, виконуємо малюнок на якому вказуємо ті сили які діють на автомобіль у верхній точці моста. А враховуючи факт того, що автомобіль з швидкістю v рухається по колу, а отже рухається з доцентровим прискоренням a=v2/R, можна стверджувати, що вздовж вертикальної осі на автомобіль окрім сили тяжіння та реакції опори діє сила інерції Fi=ma=mv2/R, і що у верхній точці моста вона направлена вертикально вгору.
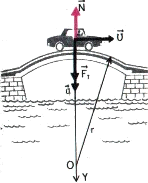
Записуємо умову динамічної рівноваги даного тіла в напрямку вертикальної осі (оскільки на малюнку ця вісь направлена вниз, то і знаки сил є відповідними):
ΣFx = Fт – Fi – N = mg – mv2/R – N = 0. Звідси випливає:
N = mg – mv2/R = m(g – v2/R)
Розрахунки: N=2·103кг(10м/с2 – (10м/с)2/40м)=2·103кг7,5м/с2 =15·103Н=15кН
Відповідь: Р = 15кН.
Задача 3. З яким прискоренням рухається брусок похилою площиною кут нахилу якої 30°, якщо коефіцієнт тертя 0,2?
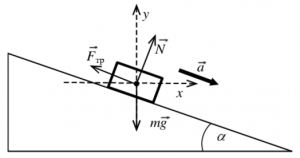
Дано:
α=30°
µ=0,2
а=?
Рішення: Виконуємо малюнок на якому: вказуємо всі діючі на тіло сили (сила тяжіння, реакція опори, сила тертя, сила інерції); задаємо систему координат; вказуємо кутову орієнтацію сил (на малюнку сила інерції не вказана). Записуємо умову динамічної рівноваги тіла і, розв’язавши систему відповідних рівнянь, визначаємо невідому величину.
∑ Fх = –Fтер –Fі + Fтsinα = 0 (1)
∑ Fу = N – Fтcosα = 0 (2)
Враховуючи, що: Fтер =µN, Fі = ma, Fт = mg, можна записати
–µN – ma + mgsinα = 0, звідси ma = mgsinα – µN .
Враховуючи, що згідно з рівнянням (2) N = Fт cosα = mgcosα, отримаємо
ma = mgsinα – µmgcosα, звідси a = g(sinα – µcosα).
Розрахунки: a = g(sin30° – µcos30°) = 9,8(м/с)2(0,50 – 0,2·0,87) = 3,2м/с2.
Відповідь: а = 3,2м/с2.
Задача 4. Літак виконує так звану «мертву петлю», яка представляє собою вертикальну колову траєкторію. З якою силою пілот тисне на сидіння літака (на опору) у верхній та нижній точках «мертвої петлі», якщо швидкість літака 360км/год, а радіус петлі 200м? Маса пілота 80кг.
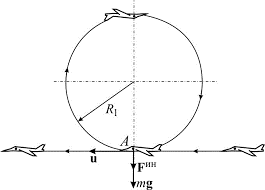
Дано:
m = 80кг
v = 360км/год =100м/с
R = 200м
N1 = ?; N2 = ?
Рішення: Виконуємо малюнок на якому вказуємо всі діючі на пілота літака сили у верхній та нижній точках «мертвої петлі». А цими силами є: сила тяжіння Fт = mg, реакція опори N та сила інерції Fi = mv2/R. У верхній і нижній точках траєкторії, вище згадані сили діють вздовж вертикалі 0у. При цьому будемо вважати, що як у верхній так і в нижній точках траєкторії реакція опори направлена вертикально вгору (на малюнку реакція опори N не показана). Зважаючи на вище сказане, запишемо умову рівноваги тіла (пілота) для нижньої (1) і верхньої (2) точок:
1) ∑Fy = –Fi – Fт + N1= 0, звідси випливає:
N1 = Fi + Fт = mv2/R + mg = 80(1002/200 + 10) =4800Н
2) ∑Fy = Fi – Fт + N2= 0, звідси випливає:
N2 = Fт – Fі = mg – mv2/R = 80(10 – 1002/200) = 80(10 – 50) = –3200 Н, знак «–» вказує на те, що в реальності реакція опори N2 направлена вниз. А це означає, що пілот з силою 3200Н тисне на опору (сидіння) і ця сила направлена вгору.
Відповідь: N1 = 4800Н; N2 = 3200Н.
Потрібно зауважити, що ту силу Р з якою тіло діє на опору, називають вагою тіла. Про суть та особливості цієї сили ми поговоримо в наступному параграфі. Наразі ж зауважимо, що за звичайних умов, вагу тіла прийнято визначати за формулою Р = mg. Скажімо за звичайних умов вага тіла масою 80кг становить 800Н. А це означає, що в умовах попередньої задачі, вага того пілоту який виконує «мертву петлю» у верхній точці петлі збільшується у 3200/800=4 рази, а в нижній точці, збільшується в 4800/800=6 разів. При цьому пілот відчуває відповідні перевантаження.
Задача 5. Через нерухомий блок перекинуто нитку до кінців якої прив’язано вантажі масою 2кг кожний. На один з вантажів поклали тягарець масою m=100г. З яким прискоренням почнуть рухатись тягарці
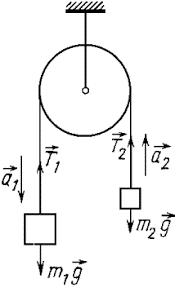
Зауваження. Нерухомий блок представляє собою легкий шків, що вільно обертається навколо нерухомої осі. Вважається, що рухомий шків не змінює натяг перекинутої через нього нитки (мотузки, канату, тощо). А це означає, що на ті тіла які знаходяться по обидва боки шківа діють однакові реакції опори Т1=Т2. (Зазвичай ту силу з якою нитка діє на тіло називають силою натягу нитки і позначають Т). За відсутності додаткової інформації, прийнято вважати, що маса рухомого шківа є нулевою, а тертя в його осі відсутнє.
Дано:
М = 2,0кг
m = 100г = 0,1кг
а =?
Рішення: Під дією тієї додаткової сили тяжіння що діє на тіло масою m1=M+m, це тіло буде опускатись з певним прискоренням а. При цьому тіло масою m2=M з таким же прискоренням буде підніматись. Зважаючи на вище сказане, виконуємо малюнок на якому вказуємо всі діючі на кожне тіло сили в тому числі і сили інерції. З аналізу малюнку, а по суті з умови динамічної рівноваги тіла, випливає:
Т1 = m1g – m1a = (M+m)g – (M+m)a,
Т2 = m2g + m2a = Mg + Ma.
А оскільки Т1=Т2 , то Mg + Ma = (M+m)g – (M+m)a, або
Ma + (M+m)a = (M+m)g – Ma, або a(2M+m) = mg.
Звідси a = mg/(2M+m) .
Розрахунки: a = mg/(2M+m) = 0,1кг·9,8(м/с2)/(2·2,0кг + 0,1кг) = 0,24м/с2.
Відповідь: а = 0,24м/с2.
Контрольні запитання.
- Яку силу називають силою інерції?
- Чи діє на тіло сила інерції при його рівномірному прямолінійному русі?; при рівномірному русі тіла по колу?
- Наведіть приклади ситуацій, в яких проявляється сила інерції.
- Поясніть, чому важкі і легкі тіла падають з однаковим прискоренням?
- Що називають динамічною рівновагою тіла?
- Що стверджується в умові динамічної рівноваги тіла?
- Чим динамічна рівновага тіла відрізняється від його механічної рівноваги?
- Який алгоритм силового методу розв’язування задач динаміки?
- Який напрям сили інерції в зображених на малюнку ситуаціях? Як змінюється при цьому швидкість тіла?
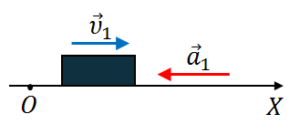
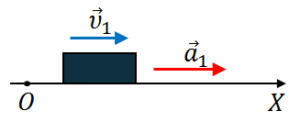
Вправа №11.
- При аварійному гальмуванні, автомобіль масою 2,5т рухається з прискоренням 4м/с2. Яка сила інерції діє на цей автомобіль. Як направлена ця сила відносно напрямку руху (напрямку швидкості) автомобіля?
- Гоночний автомобіль розганяється до швидкості 108км/год за 5с. Яка сила інерції діє при розгоні на водія автомобіля, якщо маса водія 80кг?
- Автомобіль з швидкістю 72км/год рухається заокругленням дороги радіус якого 400м. Яка сила інерції діє при цьому на водія автомобіля, якщо маса водія 80кг? Який напрям цієї сили?
- З якою силою тіло масою 50кг тисне на опору в ситуаціях:
а) система опора-тіло знаходиться в стані механічного спокою;
б) система опора-тіло рухається з направленим вгору прискоренням 5м/с2;
в) система опора-тіло рухається з направленим вниз прискоренням 5м/с2?
- В процесі аварійного гальмування, автомобіль масою 1,5т рухається з прискоренням 4м/с2. Визначити діючу на автомобіль силу тертя та коефіцієнт тертя
- 6. З яким прискоренням рухатиметься брусок похилою площиною, якщо кут нахилу площини 30°, а коефіцієнт тертя 0,15?
- Автомобіль масою 2т рушаючи з місця досягає швидкості 30м/с за 20с. Визначити силу тяги автомобіля, якщо коефіцієнт опору руху становить 0,05.
- З якою силою буде тиснути автомобіль масою 2т на середину опуклого моста, якщо радіус моста 100м, а швидкість автомобіля 36км/год?
- З якою швидкістю має рухатись автомобіль опуклою ділянкою дороги радіус кривизни якої 40м, щоб в верхній точці опуклості, тиск на дорогу дорівнював нулю?
- Літак виконує “мертву петлю” радіусом 480м і рухається по ній з швидкістю 432км/год. З якою силою льотчик масою 85кг буде тиснути на сидіння літака: а) у верхній точці петлі, б) в нижній точці петлі?
- На одному кінці нитки перекинутої через нерухомий блок, прив’язано вантаж масою m, а на другому – в двічі легший вантаж. З яким прискоренням рухаються вантажі?
.
Лекційне заняття №12. Тема: Про вагу, невагомість та силу Архімеда.
Однією з найбільш суперечливих фізичних величин механіки є вага. В науковій літературі її часто плутають з силою тяжіння, а у побуті – з масою. Насправді ж вага, це та сила з якою тіло діє на опору. Скажімо та сила з якою ви тиснете на підлогу є вашою вагою. Виходячи з того, що вага (Р) – це та сила з якою тіло діє на опору, а реакція опори (N) – це та сила з якою опора діє на тіло, та враховуючи що ці сили є діючою і протидіючою силами, а отже рівними за величиною і протилежними за напрямком, можна дати наступне визначення.
Вага – це та сила з якою тіло діє на опору і яка чисельно дорівнює реакції цієї опори.
Позначається: Р
Визначальне рівняння: Р = – N, де N – реакція опори
Одиниця вимірювання: [P] = H, ньютон.
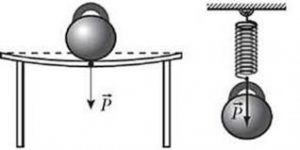
Мал.44. Вага – це та сила з якою тіло діє на опору.
Більшість людей схильні вважати, що вага тіла вимірюється в кілограмах. Ця, глибоко вкорінена помилкова думка, має своє логічне пояснення. І це пояснення полягає в наступному. Коли ви приходите в крамницю за цукром, картоплею чи м’ясом, то приходите за певною кількістю речовини. А універсальною мірою кількості речовини в тілі є його маса, тобто та величина яка вимірюється в кілограмах. А як на практиці вимірюють масу тіла? Правильно – шляхом зважування. І це зважування полягає в тому, що відповідне тіло кладуть на спеціальну опору (ваги), ця опора відчуває вагу тіла і відповідним чином реагує на цю вагу (силу). Результатом же цієї реакції є відповідне відхилення стрілки приладу. А оскільки ви прийшли не за силою (не за ньютонами), а за певною речовиною, тобто за тим що вимірюється в кілограмах, то результат зважування вам видають в цих самих кілограмах. Ясно, що така повсякденна практика, формує впевненість в тому, що вага – це те що вимірюється в кілограмах. Насправді ж, вага – це сила яку відчуває та опора на якій знаходиться дане тіло. І як будь яка сила, вага вимірюється в ньютонах.


Мал.45. Оскільки на практиці масу тіла, тобто те що вимірюється в кілограмах визначають шляхом зважування, то в свідомості пересічної людини, термін зважування а отже «вага» асоціюється з тим, що вимірюється в кілограмах.
Ще однією загально поширеною помилкою є думка про те, що вага тіла дорівнює тій силі з якою тіло притягується до Землі, і що тому вага визначається за формулою P = mg. Насправді ж, вага – це та сила з якою тіло діє на опору і яка чисельно дорівнює тій силі з якою опора діє на тіло P = N, а з урахуванням напрямку цих сил P = –N.
Загалом, на відміну від маси тіла, яка за будь яких обставин залишається незмінною (звичайно, якщо не враховувати ті практично не помітні ефекти про які ви дізнаєтесь вивчаючи теорію відносності), вага тіла в різних обставинах може бути абсолютно різною. Скажімо на Землі (g=9,81м/с2) вага тіла масою 10кг становить 98,1Н. На Місяці (g=1,6м/с2) ця вага дорівнюватиме 16Н; на Марсі (g=3,7м/с2) – 37Н; на Юпітері (g=25,9м/с2) – 259Н; а на Сонці (g=274,1м/с2) – 2741Н. Тому наприклад на Місяця, тіло масою 600кг, важитиме стільки ж як на Землі тіло масою 98кг.
Мал.46. На Місяці вага тіла у шість разів менша ніж на Землі.
Більше того, вага тіла залежить не лише від параметрів того гравітаційного поля яке створює відповідна планета, а й від багатьох інших обставин. Зокрема від того, з яким прискоренням і в якому напрямку рухається система опора-тіло. Ілюструючи цю залежність розглянемо конкретну задачу.
Задача 1. Тіло масою 70кг знаходиться в ліфті. Визначити вагу цього тіла в наступних ситуаціях: а) ліфт знаходиться в стані механічної рівноваги (v=0 або v=const, тобто а=0м/с2); б) ліфт рухається з прискоренням а=5м/с2 і це прискорення направлене вгору; в) ліфт рухається з прискоренням а=5м/с2 і це прискорення направлене вниз; г) ліфт знаходиться в стані вільного падіння тобто падає з прискоренням а=g=10м/с2.
Дано:
m = 70кг
а1 = 0м/с2
а2 = 5м/с2↑
а3 = 5м/с2↓
а4 =g=10м/с2↓
Р1=?, Р2=?,
Р3=?, Р4=?
Рішення: Будемо виходити з того, що вага тіла – це та сила з якою тіло діє на опору, в нашому випадку – на підлогу ліфта, і що величина цієї сили дорівнює відповідній реакції опори (Р=N). А це означає, що рішення задачі зводиться до того, щоб визначити величину реакції опори в кожній з чотирьох ситуацій.
Розв’язуючи цю задачу, виконуємо відповідні малюнки на яких вказуємо ті сили що діють на дане тіло. А цими силами є: сила тяжіння Fт = mg, реакція опори N та, за наявності прискорення, сила інерції Fi = –ma. Зважаючи на вище сказане, проаналізуємо кожну з чотирьох ситуацій і визначаємо вагу тіла в кожній з них.
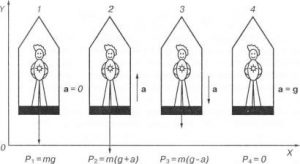
P1 = N1 = Fт = mg = 700Н;
P2 = N2 = Fт + Fi = mg+ma = 1050Н
P3 = N3 = Fт – Fi = mg–ma = 350Н
P4 = N4 = Fт – Fi = mg–mg=0Н
Мал.47. Маса тіла одна і таж, а вага – різна.
Не важко бачити, що вага тіла, тобто та сила з якою тіло тисне на опору, не є постійною величиною. При цьому, лише в тому випадку коли система опора-тіло знаходиться в стані механічної рівноваги (v=0 або v=const), вага тіла чисельно дорівнює діючій на нього силі тяжіння: Р1=mg. В інших випадках, вага тіла може бути як більшою так і меншою за цю силу: Р2=m(g+a); Р3=m(g–a). Якщо ж система опора – тіло знаходиться в стані вільного падіння (а=g), то тіло не тисне на опору і тому його вага дорівнює нулю: Р4=mg–mg=0. Характеризуючи дану ситуацію говорять про те, що тіло знаходиться в стані невагомості.
Зверніть увагу, тіло знаходиться в стані невагомості (має нульову вагу) не тому що на нього не діє сила тяжіння, а тому, що дія цієї сили зрівноважується відповідною силою інерції. Невагомість – це такий стан системи опора-тіло, при якому тіло та його окремі елементи не мають ваги, тобто не тиснуть на опору і одне на одне. Не мають ваги тому, що діюча на них сила тяжіння зрівноважується відповідною силою інерції.


Мал.48. Невагомість, це не тому що на тіло не діє сила тяжіння, а тому що діюча на тіло сила тяжіння зрівноважується силою інерції.
Загально відомим прикладом невагомості є невагомість на борту штучних супутників Землі. При цьому люди часто думають, що ця невагомість пояснюється відсутністю сили тяжіння. Насправді ж, на тих висотах де зазвичай літають наші пілотовані космічні кораблі (200км – 400км), сила тяжіння майже така ж як і на поверхні землі. А невагомість в космічному кораблі (штучному супутнику Землі) пояснюється не відсутністю сили тяжіння, а фактом того, що ця сила зрівноважується відповідною силою інерції.
Дійсно, як і на будь яке земне тіло, на штучний супутник Землі діє певна сила тяжіння (Fт = mg). Сила, яка прагне перемістити тіло до центру Землі. І якщо супутник всупереч дії сили тяжіння не опиняється на землі, то це тільки тому, що на нього, окрім сили тяжіння діє рівна їй за величиною і протилежна за напрямком сила інерції (Fi = –ma). Але для того щоб така сила з’явилась, супутник має з певною визначеною швидкістю обертатись навколо Землі. Адже в цьому випадку, супутник буде рухатись з певним доцентровим прискоренням (ад=v2/R), а отже на нього буде діяти відповідна відцентрова сила інерції (Fі=mv2/R). Що ж давайте визначимо ту швидкість, з якою тіло має обертатись навколо Землі і не падати на неї. Цю швидкість прийнято називати першою космічною швидкістю.
Задача 2. Відомо, що радіус Землі 6,37·106м, а прискорення вільного падіння на ній 9,8м/с2. Визначити ту швидкість з якою тіло (штучний супутник) має обертатись навколо Землі і не падати на неї.
.
Дано:
R = 6,37·106м
g = 9,8м/с2
Fі = Fт
v = ?
Рішення: Виконуємо малюнок на якому вказуємо наявну ситуацію та ті сили, що діють на супутник в процесі його обертання навколо Землі. А цими силами є: сила тяжіння Fт = mg та сила інерції Fі = mад = mv2/R (як завжди, сила інерції на малюнку не зображена). Оскільки супутник не падає на Землю і не віддаляється від неї, то це означає, що діючі на нього сила тяжіння та сила інерції урівноважують одна одну (Fі = Fт) і тому mv2/R = mg. Звідси v2 = mgR/m, звідси v2 = gR, звідси v = √gR. Розрахунки: v = √gR = √(9,8м/с2 6,37·106м) = √(62,4·106м2/с2) = 7,9·103м/с.
Відповідь: Для того щоб тіло не падало на Землю і не віддалялось від неї, тобто стало штучним супутником Землі, необхідно щоб воно рухалось з швидкістю v=7,9·103м/с=7,9км/с. Цю швидкість називають першою космічною швидкістю.
Ясно, що біля поверхні Землі змусити тіло тривалий час рухатись з швидкістю 7,9км/с практично не можливо. Не можливо по перше тому, що щільна атмосфера Землі шалено протидіє швидкому руху тіл і гальмує цей рух. А по друге, в процесі надшвидкого руху в атмосфері Землі, тіла надзвичайно швидко нагріваються і по суті згорають. Власне тому, штучні супутники потрібно виводити за межі щільних шарів атмосфери Землі, а це що найменше 100км над її поверхнею.
Іноді можна почути, як старші школярі провокативно запитують своїх молодших колег: що важче, кілограм заліза чи кілограм вати (пір’я, пінопласту, тощо)? А коли ті відповідають що залізо важче, дружно сміються, хизуючись своєю кмітливістю. І потрібно сказати, сміються абсолютно безпідставно. Адже кілограм заліза дійсно важчий за кілограм вати. Звичайно за умови, що мова йде саме про кілограм, тобто про масу в 1000,00г. А оскільки факт того, що в умовах Землі та загально прийнятого способу визначення ваги, кілограм заліза важчий за кілограм вати, нерозривно пов’язаний з законом Архімеда та силою Архімеда, то буде не зайвим нагадати.
Закон Архімеда – це закон, в якому стверджується: на будь яке занурене в рідину (або газ) тіло, діє виштовхувальна сила, величина якої дорівнює вазі виштовхнутої тілом рідини. Наочно переконатися в достовірності даного твердження дозволяє проста система, складовими якої є (мал.49): штатив, пружинний динамометр (1), маленьке відерце (2), досліджуване тіло (3), відливний стакан (4), стакан для відлитої води (5).
Мал.49. На занурене в рідину тіло діє виштовхувальна сила, величина якої дорівнює вазі виштовхнутої тілом рідини (закон Архімеда). FA=Pp=mg=ρpVg.
Принцип дії даної системи очевидно простий. Під вагою досліджуваного тіла, пружина динамометра видовжується (мал.49а) і це видовження фіксує стрілка приладу, вказуючи на жовту точку відповідної шкали. Коли досліджуване тіло опиняється у воді вщерть заповненого відливного стакана (мал.49б), то: по-перше, діюче на пружину динамометра навантаження зменшиться на величину тієї виштовхувальної сили яка діє на тіло; по-друге, певна кількість води вильється з відливного стакана і ця кількість дорівнюватиме об’єму зануреного у воду тіла. Якщо ж взяти виштовхнуту тілом воду і вилити у відерце системи (мал.49в), то неодмінно з’ясується, що вага цієї води в точності дорівнює величині діючої на тіло сили Архімеда (стрілка динамометра знову вказує на жовту точку).
Сила Архімеда – це та сила, з якою тіла виштовхуються з рідин та газів і яка дорівнює вазі виштовхнутої тілом рідини або газу.
Позначається: FА
Визначальне рівняння: FА=ρрVg, де ρр – густина рідини (газу); V – об’єм зануреної в рідину (газ) частини тіла; g – прискорення сили тяжіння;
Одиниця вимірювання: [FА] = H, ньютон.
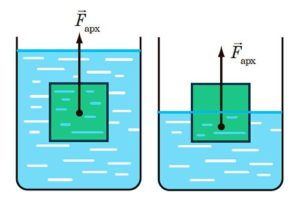
Мал.50. На будь яке занурене в рідину або газ тіло діє виштовхувальна сила Архімеда, величина якої визначається за формулою FА=ρVg.
Зважаючи на вище сказане розв’яжемо наступну задачу.
Задача 3. Визначити на скільки тона заліза (ρ1=7800кг/м3) важча за тону вати*) (ρ2=200кг/м3). Густина повітря ρ=1,3кг/м3. *) Звичайно, вата не має певної чітко визначеної густини, тому будемо умовно вважати, що густина вати дорівнює густині пробкового дерева, а ця густина становить 200кг/м3.
.
Дано:
m1=m2=1000,00кг
ρ1=7800кг/м3
ρ2=500кг/м3
ρ = 1,3кг/м3
g =9,81м/с2
ΔP = P1 – P2 = ?
Рішення: Оскільки за визначенням, вага тіла чисельно дорівнює реакції відповідної опори (Р1=N1; Р2=N2), то рішення задачі полягає у визначенні цих реакцій. Виходячи з цього, розглянемо ті сили що діють на залізне (1) та ватне (2) тіло. А цими силами є: сила тяжіння Fт=mg, реакція опори яка і дорівнює вазі тіла (Р1=N1; Р2=N2), та сила Архімеда FA=ρVg. Із аналізу діючих на тіло сил (із умови рівноваги тіл) випливає:
N1= Fт – FА1 = m1g – ρV1g = m1g – ρm1g/ρ1 = m1g(1 – ρ/ρ1);
N2 = Fт – FА2 = m2g – ρV2g = m2g – ρm2g/ρ2 = m2g(1 – ρ/ρ2) .
Таким чином: N1 = m1g(1 – ρ/ρ1); N2 = m2g(1 – ρ/ρ2) .
Розрахунки: P1 = N1 = … = 9808,4H;
P2 = N2 = … = 9746,2H.
ΔP = P1 – P2 = 62,2H
Відповідь: тона заліза на 62,2Н важча за тону вати, що відповідає додатковій масі вати Δm=6,3кг (за умови, що визначення ваги відбувається в повітряному середовищі).
Таким чином, теорія стверджує що тона заліза на 62,2Н важча за тону вати. Причина появи цієї різниці очевидна – на більш об’ємну вату діє більша сила Архімеда і тому його вага виявляється дещо меншою.
Чому ж ми вважаємо, що тона заліза і тона вати мають однакову вагу? Більше того, якщо ми дійсно зважимо реальну тону заліза і реальну тону вати, то скоріш за все ця вага виявиться однаковою. І справа не втому, що точність вимірювальних приладів не дозволяє зафіксувати наявну різницю ваги. Справа в іншому – цієї різниці просто не існує. Не існує тому, що масу вати ми зазвичай визначаємо шляхом її зважування і ясна річ, це зважування проводимо в повітряному середовищі. А це означає, що у визначеній таким чином тоні вати, фактично не 1000,0кг а приблизно 1006,3кг. Поява цієї різниці знову ж таки обумовлена дією сили Архімеда. Адже для того, щоб ватне тіло зрівноважило еталонну залізну гирю, маса цього тіла має бути дещо більшою за масу гирі. Більшою на ту величину яка дозволяє компенсувати надлишкову силу Архімеда (в умовах нашої задачі Δm=6,3кг).
Таким чином, якщо кілограм вати і кілограм заліза мають однакову вагу, то це тільки тому, що фактична маса вати дещо більша за кілограм. Якщо ж ми дійсно візьмемо кілограм заліза і кілограм вати, то вага заліза буде більшою за вагу вати. Звичайно за умови, що процес зважування відбувається у повітряному середовищі.
Контрольні запитання.
- Що називають вагою тіла?
- Чому люди часто вважають, що вага тіла вимірюється в кілограмах?
- В яких випадках формула Р=mg є правильною, а в яких не правильною?
- Чи є вага тіла безумовно постійною величиною? Від чого залежить вага тіла?
- Що називають невагомістю?
- В кабіні штучного супутника Землі тіло знаходиться в стані невагомості. Чи означає цей факт, що на нього не діє сила тяжіння?
- Коли ліфт рухаючись вгору набирає швидкість, пружини під його підлогою дещо просідають, а коли зупиняється – дещо випрямляються. Чому це відбувається?
- Яку швидкість називають першою космічною?
- Що стверджується в законі Архімеда?
- Яку силу називають силою Архімеда?
- В якому випадку вага кілограму заліза і кілограму вати буде різною, а в якому однаковою?
Вправа №12.
- Визначте вагу тіла масою 70кг на Землі; на Місяці, на Марсі; на Юпітері.
- Ракета піднімається вертикально вгору з прискоренням а=3g. Якою буде в цій ракеті вага тіла масою 50кг?
- З якою силою людина масою 80кг тисне на підлогу ліфта, що рухається з прискоренням 2м/с2, направленим а) вгору; б) вниз?
- Ліфт рівноприскорено розганяється до швидкості 7м/с за 5с. За такий же час він і зупиняється. Визначити вагу людини масою 80кг на ділянках розгону та зупинки ліфта.
- З якою швидкістю має рухатись автомобіль по опуклому мосту, радіус кривизни якого 90м, щоб у верхній точці моста, тиск автомобіля на поверхню моста дорівнював нулю?
- Відомо, що радіус Місяця 1,74·106м, а прискорення вільного падіння на ньому 1,6м/с2. Визначити ту швидкість з якою тіло (штучний супутник) має обертатись навколо Місяця і не падати на нього.
- Визначити першу космічну швидкість для Марса якщо його радіус 3,4·106м, а прискорення вільного падіння на ньому 3,7м/с2.
- Парашутист, досягши в затяжному стрибку швидкості 55м/с, розкриває парашут, після чого за 2с його швидкість зменшується до 5м/с. Визначте вагу парашутиста під час гальмування, якщо його маса 80кг.
- Якої тривалості має бути доба на Землі, щоб тіла на її екваторі були невагомі?
.
Лекційне заняття №13. Тема: Закон Всесвітнього тяжіння. Про силу гравітаційну та силу тяжіння. Механіка Сонячної системи.
В 1667 році аналізуючи поведінку Місяця та планет Сонячної системи, Ісаак Ньютон дійшов висновку: масивні тіла взаємно притягуються з силою, величина якої прямо пропорційна добутку взаємодіючих мас і обернено пропорційна квадрату відстані між ними. Однак, лише через двадцять років, цей висновок був офіційно опублікований у вигляді закону всесвітнього тяжіння. В цьому законі стверджується: дві матеріальні точки масою m1 і m2 взаємно притягуються з гравітаційною силою (Fгр), величина якої прямо пропорційна добутку взаємодіючих мас (m1∙m2) і обернено пропорційна квадрату відстані між ними (r2). Іншими словами: Fгр=Gm1m2/r2, де G=6,6720∙10–11 (Н∙м2/кг2) – гравітаційна стала, постійна величина значення якої визначається експериментально. (Гравітаційна сила, гравітаційна стала, гравітаційне поле, тощо, походять від латинського gravitas – тяжіння).
Гравітаційна стала (G = 6,6720∙10–11Н∙м2/кг2) – це постійна величина, яка чисельно дорівнює тій гравітаційній силі з якою взаємодіють дві матеріальні точки масою по 1кг кожна, будучи розташованими на відстані 1м одна від одної. Іншими словами: якщо m1=m2=1кг; r=1м то Fгр= 6,67∙10–11Н = 0,0000000000667Н.
Із вище сказаного ясно, що за питомою (одиничною) величиною, сили гравітаційної взаємодії є надзвичайно слабкими. Тому ми абсолютно не помічаємо факту того, що з певною гравітаційною силою притягуємся до навколишніх предметів. Однак, коли мова заходить про тіла космічних масштабів, то для них питомо слабкі гравітаційні сили, набувають фантастично великих значень. Скажімо Місяць притягується до Землі (а відповідно й Земля до Місяця) з силою 2∙1020Н. Ілюструючи масштаб цієї сили, достатньо сказати, що для її передачі від Землі до Місяця знадобився б сталевий трос діаметром 5000км і масою яка дорівнює масі Землі.
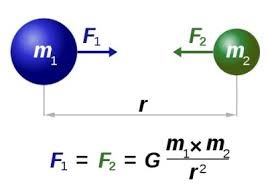
. 1кг ← 1м → 1кг
Fгр=0,0000000000667Н
Земля ↔ Місяць
Fгр=200 000 000 000 000 000 000Н
Мал.51. В масштабах земних тіл, сили гравітаційної взаємодії є гранично малими, а в масштабах космічних об’єктів – фантастично великими.
Оцінюючи значимість гравітаційних сил достатньо сказати, що саме ці сили об’єднують зірки, їх планети, супутники планет, астероїди та купу дрібніших об’єктів, у відповідні планетарні системи. Саме сили гравітаційної взаємодії об’єднують зірки в галактики, галактики – в метагалактики, метагалактики – у Всесвіт. Саме гравітаційні сили стискають та розігрівають надра зірок до таких тисків і температур при яких відбуваються ті термоядерні реакції які є джерелом світла, енергії та життя не тільки на Землі, а і у всьому Всесвіті.
Можна довести, що формула Fгр=Gm1m2/r2 справедлива не лише для матеріальних точок, а й для тіл довільних розмірів та форм. При цьому, має виконуватись лише одна умова: речовина у відповідному тілі має бути симетрично розподіленою відносно його центру мас. Наприклад, при взаємодії Землі з тілом що лежить на її поверхні, нашу планету навряд чи можна назвати матеріальною точкою. Але оскільки Земля, це куля з практично ідеально симетричним розподілом речовини в ній, то при розрахунках цілком обгрунтовано застосовують формулу Fгр=GMm/R2, де m – маса тіла, М – маса Землі (М=5,98∙1024кг), R – радіус Землі (R= 6,37∙106м).
Говорячи про силу гравітаційної взаємодії, не можна не згадати і про ту силу, яку називають силою тяжіння. Часто думають, що діюча на земні тіла сила тяжіння (Fт=mg) та сила гравітаційної взаємодії цих тіл з Землею (Fгр=GMm/R2), це дві назви однієї і тієї ж сили. Така думка не є безумовно правильною. Адже мова йде хоч і про дуже схожі, але все таки суттєво різні сили. Пояснюючи суть тих відмінностей які існують між силою тяжіння та силою гравітаційної взаємодії, можна сказати наступне.
Коли говорять про силу гравітаційної взаємодії, то мають на увазі ту силу з якою взаємодіють тіла, у відповідності з законом всесвітнього тяжіння. Іншими словами: Сила гравітаційної взаємодії (гравітаційна сила) – це та сила, з якою тіла взаємодіють згідно з законом всесвітнього тяжіння.
Позначається: Fгр
Визначальне рівняння: Fгр =Gm1m2/r2
Одиниця вимірювання: [Fгр]=H.
Для тих тіл, що знаходяться на поверхні землі та в близьких околицях цієї поверхні (r=R), визначальне рівняння сили гравітаційної взаємодії між Землею та відповідним тілом набуває вигляду Fгр=GMm/R2.
Якби Земля не оберталась навколо своєї осі, то та сила яку ми називаємо силою тяжіння (Fт=mg) в точності дорівнювала б тій силі яку прийнято називати гравітаційною (Fгр=GMm/R2). Однак в реальності Земля обертається навколо своєї осі і тому, всі тіла на її поверхні рухаються відповідними круговими траєкторіями, а отже рухаються з певним доцентровим прискоренням: aд =v2/r, де r – відстань від даного тіла до осі обертання Землі (для полюсів r=0; для екватора r=R). А це означає, що на кожне тіло земної поверхні діє певна сила інерції Fi = maд, яка направлена в протилежну сторону від доцентрового прискорення.
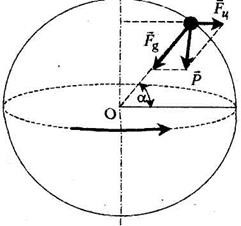
Мал.52. Оскільки Земля обертається, то на кожне тіло її поверхні окрім гравітаційної сили неминуче діє і певна сила інерції.
Таким чином, на кожний земний об’єкт масою m постійно та одночасно діють дві сили: сила гравітаційної взаємодії та сила інерції: Fгр =m(GM/R2); Fі =mад. І не важко бачити, що кожна з цих сил пропорційна масі тіла. Більше того, в загальній теорії відносності стверджується, що силові прояви інерції та гравітації є тотожними (еквівалентними). А це означає, що ніякими експериментами і ніякими приладами не можливо відділити силу інерції від сили гравітації. Не можливо тому, що ці дві, на перший погляд абсолютно різні сили, є різними проявами фактично однієї і тієї ж сили.
В такій ситуації, та сила яку ми називаємо силою тяжіння, фактично є результуючою двох сил: сили гравітаційної взаємодії тіла з Землею, та діючої на це ж тіло сили інерції, поява якої обумовлена обертанням Землі навколо своєї осі. Іншими словами:
Сила тяжіння – це та сила, з якою тіла притягуються до Землі і яка дорівнює векторній сумі сили гравітаційної взаємодії тіла з Землею та обумовленої обертальним рухом Землі, сили інерції.
Позначається: Fт
Визначальне рівняння: Fт = Fгр + Fі
Одиниця вимірювання: [Fт]=H
Зазвичай силу тяжіння визначають дещо простіше: Сила тяжіння – це та сила з якою тіла притягуються до землі і яка визначається за формулою Fт = mg, де g – прискорення сили тяжіння (прискорення вільного падіння). По суті, визначальні рівняння Fт = Fгр + Fі та Fт = mg є тотожними. При цьому ясно, що з практичної точки зору, рівняння Fт = mg є більш зручним і тому більш вживаним.
Можна довести, що інерційна складова сили тяжіння, набагато менша за гравітаційну складову цієї сили. Дійсно. Оскільки за добу (t=Т=24∙60∙60с), те тіло що знаходиться на поверхні Землі описує повне коло, тобто проходить відстань ℓ=2πr, то швидкість руху цього тіла v=ℓ/t=2πr/T. Звідси випливає, що Fi=maд=mv2/r= m(2πr/T)2/r=m4π2r/T2. А це означає, що на полюсі (r=0) сила інерції є нулевою, а на екваторі (r=R) – максимально великою. При цьому, для максимального значення сили інерції Fгр/(Fi)max=(GMm/R2):(m4π2R/T2) = GMT2/4π2R3 = … = 300.
Таким чином, навіть максимальна величина тієї сили інерції поява якої обумовлена добовим обертанням Землі, в 300 разів менша за величину тієї гравітаційної сили з якою відповідне тіло притягується до Землі.
Зважаючи на факт того, що інерційна складова сили тяжіння в сотні разів менша за її гравітаційну складову, в подальшому будемо вважати, що Fт = Fгр. Однак, в будь якому випадку ви маєте знати, на земні об’єкти, окрім гравітаційної сили, постійно діє певна сила інерції, і що сила тяжіння є результуючою цих двох сил.
До речі. Саме факт обертання Землі навколо своєї осі, а відповідно і факт дії на всі її об’єкти певної сили інерції, є причиною того, що наша планета не є безумовно круглою (кулястою). Дійсно, якби Земля не оберталась навколо своєї осі, то під дією об’ємно-центральних сил гравітації, вона б набула практично ідеальної кулястої форми. (Звичайно, за винятком тих поверхневих нерівностей, які є результатом певних геологічних процесів і які називаються горами, нагір’ями, впадинами, каньйонами, тощо). Однак в реальності Земля обертається і тому на всі її об’єкти неминуче діють плоско-відцентрові сили інерції, які відповідним чином деформують Землю та надають її форму еліпсоїда. Щоправда, різниця між екваторіальним та полярним радіусом Землі є незначною і становить всього 21,4км. Тим не менше, ця різниця існує і її поява обумовлена фактом добового обертання Землі та реальності існування сили інерції.
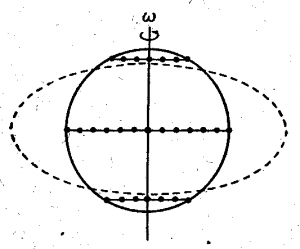
Мал.53. Оскільки Земля обертається навколо своєї осі, то під дією сил інерції вона набуває відповідної еліпсоїдної форми.
Сили гравітаційної взаємодії та сили інерції є тими базовими силовими чинниками, які визначають загальний устрій як Сонячної системи так і Всесвіту загалом. В свій час, ми поговоримо про те як і коли виникла Сонячної системи. Сьогодні ж, просто констатуємо той факт, що сучасна Сонячна система, це злагоджений цілісний механізм, який сформувався приблизно 4,5 мільярдів років тому і який з тих пір бездоганно працює. Центральним об’єктом цього механізму є зірка середніх розмірів, яку ми називаємо Сонцем і навколо якої обертаються її великі та малі природні супутники: планети, астероїди, комети та інші тіла При цьому, більшість планет мають свої супутники. Наприклад Земля має один, але відносно великий природний супутник – Місяць. Марс, має два супутники, а Юпітер – 79.
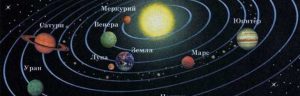
Мал.54. Схема загального устрою Сонячної системи.
Сонячна система, це складний, злагоджений механізм. Однак, якщо говорити про загальний принцип дії цього механізму, то він досить простий і полягає в наступному. Кожен елемент системи, під дією сили гравітаційної взаємодії та сили інерції, обертається навколо центрального тіла. При цьому, швидкість обертання є такою, що забезпечує динамічну рівновагу між силою гравітаційної взаємодії та силою інерції. Наприклад, Місяць (мал.55) обертається навколо Землі з такою швидкістю при якій діюча на нього гравітаційна сила (Fгр=GMm/ℓ2) динамічно зрівноважується відповідною силою інерції (Fi=mv2/ℓ), тобто з швидкістю v=√(GM/ℓ)= √[6,67·10–11(м3/кг·с2)6·1024кг/(3,84·108м)2] = 1,02·103м/с = 1,02км/с; (де М=6,0∙1024кг – маса Землі, ℓ=3,84∙108м – відстань між центрами мас Землі та Місяця).
Мал.55. При обертальному русі Місяця навколо Землі, та планет навколо Сонця, виконується умова їх динамічної рівноваги: Fгр = Fi.
Переконатись в тому, що Місяць дійсно обертається з швидкістю 1,02км/с не важко. Дійсно. Оскільки за один оберт навколо Землі, який, як відомо, триває t=Т=27,3доби=23,6∙105с, Місяць проходить відстань L=2πℓ=24,1∙108м, то його швидкість становить v=L/T= 24,1·108м/23,6·105с = 1,02·103м/с =1,02км/с.
Знаючи та розуміючи механіку Сонячної системи, не важко визначити маси її основних елементів. Звичайно, планети, зірки та галактики «зважують» не так як картоплю на базарі. Подібні «зважування» називають непрямими вимірюваннями. Непряме вимірювання, це таке вимірювання при якому фактично вимірюють не ту величину яку потрібно виміряти, а інші з нею пов’язані величини. При цьому значення потрібної величини визначається за відповідною формулою. Наприклад, визначаючи площу круга, ми фактично вимірюємо його радіус (R) або діаметр (d), а площу круга визначаємо за тією формулою яка відображає зв’язок між площею круга та його радіусом (діаметром): S=πR2=πd2/4. Або скажімо визначаючи масу Землі (M), вчені фактично вимірюють не масу Землі, а прискорення сили тяжіння на ній (=9,81м/с2). При цьому визначивши формулу зв’язку між масою Землі та прискоренням сили тяжіння на ній, визначають (вимірюють) масу Землі. І не вірити результатам такого вимірювання, це все рівно ніби не вірити тому, що визначена за формулою S=πd2/4 площа круга, гранично точно відповідає реальній площі цього круга. Не вірити лише на підставі того, що ми вимірювали не площу круга, а його діаметр.
Задача 1. Знаючи прискорення вільного падіння (g=9,8м/с2) та радіус Землі (R=6,4∙106м), визначити масу Землі.
Дано:
g = 9,81м/с2
R = 6,4·106м
М = ?
Рішення: Виходячи з того, що ту силу з якою земне тіло масою m притягується до Землі, з одного боку можна визначити силу тяжіння Fт = mg, а з іншого – як силу гравітаційної взаємодії тіла з Землею Fгр = GMm/R2, та враховуючи що ці сили є практично рівними (Fт = Fгр), можна записати: mg = GMm/R2, звідси M = gR2/G.
Розрахунки: M=gR2/G = 9,81(м/с2)(6,37∙106м)2/6,67·10–11(м2/Н·кг2) = 6,0∙1024кг.
Відповідь: М = 6,0·1024кг.
Задача 2. Знаючи період обертання Місяця навколо Землі (Т=27,3доби= 2,36∙106с) та відстань між центрами мас Землі і Місяця (ℓ=3,84∙108м), визначити масу Землі.
Дано:
Т = 2,36∙106с
ℓ=3,84∙108м
М = ?
Рішення: З’ясовуючи той зв’язок що існує між масою Землі (М), періодом обертання Місяця навколо неї (Т) та відстанню між центрами Землі і Місяця (ℓ), розглянемо ті сили, що діють на Місяць та забезпечують його динамічну рівновагу. А цими силами є, сила гравітаційної взаємодії Місяця з Землею Fгр=GМm/ℓ2 та обумовлена обертальним рухом Місяця сила інерції Fi = maд=mv2/ℓ, де v=2πℓ/T. А оскільки, діючі на Місяць гравітаційна сила та сила інерції зрівноважують одна одну (Fгр=Fі), то можна записати GMm/ℓ2 = m4πℓ/T2. Звідси випливає: M=4π2ℓ3/GT2.
Розрахунки: M = 4·3,142(3,84∙108м)3/6,67·10–11(м2/Н·кг2)(2,36∙106с)2= 6,0∙1024кг.
Відповідь: М = 6,0∙1024кг.
Зверніть увагу на те, що масу Землі ми визначили двома абсолютно різними способами. При цьому отримані нами результати виявились практично однаковими. А це безумовно доводить, що виконані нами вимірювання є правильними.
Задача 3. Знаючи період обертання Землі навколо Сонця (365 днів) та відстань між їх центрами (1,49∙1011м) визначити масу Сонця та швидкість обертання Землі навколо Сонця.
Дано:
Т=365 днів = 31,54∙106с
ℓ=1,49∙1011м
v = ?; М=?
Рішення: Виконуємо малюнок на якому вказуємо ті сили які діють на Землю в процесі її обертання навколо Сонця. А цими силами є: 1) сила гравітаційної взаємодії між Землею та Сонцем (Fгр = GMm/ℓ2); 2) виникаюча в процесі обертального руху Землі сила інерції (Fi =mv2/ℓ). А оскільки Земля обертається навколо Сонця по майже круговій орбіті, то можна стверджувати, що ці дві сили є рівні за величиною і протилежні за напрямком, тобто що: GMm/ℓ2=mv2/ℓ. Звідси випливає, що М=v2ℓ/G, де G=6,67·10–11м3/кг·с2; v – швидкість обертання Землі навколо Сонця.
Величину тієї швидкості з якою Земля обертається навколо Сонця, можна визначити із наступних міркувань. Оскільки за рік (Т=365 днів = 31,54∙106с) Земля проходить відстань L=2πℓ, то швидкість її руху v = 2πℓ/T. Таким чином, швидкість обертання Землі навколо Сонця та масу Сонця, можна визначити за формулами v = 2πℓ/T; М=v2ℓ/G.
Розрахунки:
v = 2πℓ/T = 2·3,14·1,49·1011м/31,54·106с = 3∙104м/с = 30км/с
М = v2ℓ/G = 3·104м/с)21,49·1011м/6,67·10–11(м3/кг·с2) = 2,0∙1030кг.
Відповідь: v = 30км/с; M =2,0·1030кг.
Вище описаний метод визначення мас, можна застосовувати не лише для системи двох окремо взятих тіл, а й для будь яких систем в яких тіло вільно обертається навколо спільного центру мас. Скажімо, наше Сонце є частиною величезної космічної Галактики в якій налічується близько 200∙109 зірок. Визначаючи масу цієї Галактики зовсім не обов’язково «зважувати» кожну окрему зірку. Достатньо визначити відстань певної зірки від центру Галактики (ℓ) та швидкість її обертання навколо цього центру (v), а потім скористатися формулою M = v2ℓ/G. При цьому отримана маса буде загальною масою всіх тих об’єктів які зосереджені у внутрішньому об’ємі тієї сфери радіус якої дорівнює відстані від центру мас Галактики до відповідної зірки.
Наприклад відомо, що Сонце віддалено від центру мас Галактики на 33 тисячі світлових років (3∙1020м) і обертається навколо цього центру з швидкістю 2,5∙105м/с. А це означає, що загальна маса тих космічних об’єктів які знаходяться в об’ємі обмеженому радіусом галактичної орбіти Сонця становить М = (2,5·105м/с)23·1020м/6,67·10–11(м3/кг·с2) = 2,8∙1041кг =140∙109М☼. Звісно, дана маса ще не є масою всієї Галактики. Адже Сонце знаходиться не на периферії Галактики, а на відстані 2/3 від її центру. Однак, якщо виміряти параметри однієї з периферійних зірок, то і загальну масу Галактики можна визначити достатньо точно.
Втім, стосовно галактик, вище описаний спосіб визначення мас потребує певних уточнень. Про причини цих уточнень ми поговоримо в процесі вивчення космології. Наразі ж зауважимо, що галактики практично завжди утворюють певні системи галактик, в яких вони обертаються одна навколо одної та навколо спільного центру мас. А це означає, що маси галактик досить точно та безумовно достовірно визначаються на основі аналізу їх міжгалактичних обертань.
Контрольні запитання.
- Поясніть фізичний зміст гравітаційної сталої.
- Чому в космічних масштабах гравітаційні сили є фантастично потужними, тоді як в умовах земного життя, практично не проявляють себе?
- Чому на земні тіла, окрім гравітаційної сили діє сила інерції?
- Як ви думаєте, з якого географічного місця (полюса, екватора чи середніх широт) енергетично доцільніше запускати космічні кораблі?
- Чим схожі і чим відрізняються діючі на земні тіла сила тяжіння та гравітаційна сила?
- Чи проходить лінія дії сили тяжіння через центр мас Землі? Якщо проходить то де і чому?
- Чи могла б існувати планетарна Сонячна система, якби її об’єкти не рухались? Чому?
- Які сили забезпечують динамічну рівновагу кожного об’єкту Сонячної системи?
- Який загальний принцип дії того механізму який називається Сонячною системою?
- В чому суть непрямих вимірювань? Наведіть приклади.
Вправа 13.
- Знаючи прискорення вільного падіння (g=1,6м/с2) та радіус Місяця (R=1,74∙106м), визначити масу Місяця.
- Визначте силу гравітаційної взаємодії між Землею та Сонцем, якщо відомо що відстань між ними 1,5∙1011м, а їх маси відповідно 6∙1024кг і 2∙1030кг.
- Космонавт масою 75кг знаходиться на висоті 300км над поверхнею Землі. З якою силою він притягується до Землі? Порівняйте цю силу з тією яка діяла б на нього на поверхні Землі. Радіус Землі 6400км.
- З якою максимальною гравітаційною силою можуть притягуватись дві однакові бетонні кулі масою по 1т кожна? Густина бетону 2,4∙103кг/м3.
- На якій відстані від поверхні Землі сила притягування космічного корабля до Землі буде у 100 разів меншою ніж на її поверхні?
- При якій тривалості доби вага тіла на екваторі Землі буде у два рази менше ніж на полюсі?
- Одна з периферійних зірок нашої Галактики віддалена від її центру на відстань 5∙1020м, обертається з швидкістю 2,8∙105м/с. Яка загальна маса Галактики? У скільки разів ця маса перевищує масу Сонця?
- Визначити першу космічну швидкість для Місяця, якщо його радіус 1760км, а прискорення вільного падіння на ньому в 6 раз менше за земне.
- Космічна станція запущена на Місяць. На якій відстані від центру Землі станція буде притягуватися Землею і Місяцем з однаковою силою? Вважати, що маса Землі більша за масу Місяця у 81 раз, а відстань між їхніми центрами дорівнює 60 земним радіусам.
.
Лекційне заняття №14. Тема: Механічні деформації. Сила пружності. Механічна напруга. Закон Гука.
Нагадаємо, механіка, це розділ фізики в якому вивчають параметри, закономірності та причини механічного руху тіл в усіх його проявах. А одним з проявів механічного руху є механічна деформація тіла, тобто будь яка зміна форми або розмірів тіла, що відбувається під дією зовнішніх сил (від лат. deformatio – викривлення). З загальними основами тієї частини механіки яка вивчає параметри, закономірності та причини механічних деформацій тіла ми стисло ознайомимся в цьому параграфі.
За реакцією тіла на припинення дії деформуючої сили, механічні деформації поділяються на пружні та пластичні. Пружною називають таку механічну деформацію, яка повністю зникає після припинення дії деформуючої сили. Пластичною називають таку механічну деформацію, яка після припинення дії деформуючої сили зберігається (залишається). Іншими словами, якщо після припинення дії деформуючої сили, тіло повністю відновлює свою попередню форму, то його деформація є пружною. Якщо ж, після припинення дії деформуючої сили, тіло зберігає надану йому форму, то його деформація є пластичною. На практиці часто зустрічаються ситуації в яких, після припинення дії деформуючої сили, тіло відновлює попередню форму (розміри) лише частково. В цьому випадку говорять про пружно-пластичну деформацію тіла.
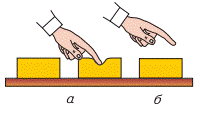
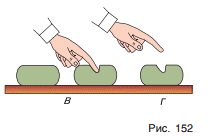
Мал.56. Приклади пружної та пластичної деформації.
Зазвичай, ті матеріали які під дією зовнішніх сил отримують пластичні деформації, не застосовуються в якості конструктивних матеріалів деталей машин та механізмів. Адже поведінка будь якої складної машини чи простого механізму має бути прогнозованою. А така прогнозованість передбачає прогнозованість форми та розмірів деталей цих машин і механізмів. Пластичні ж деталі забезпечити таку прогнозованість не можуть. Тому в механіці по суті вивчають властивості лише пружних матеріалів та відповідних тіл.
За характером діючих на тіло деформуючих сил та за характером тих геометричних змін які відбуваються в деформованому тілі, все різноманіття пружних механічних деформацій прийнято розділяти на чотири різновидності:
- деформація розтягнення-стиснення (мал.57а,б);
- деформація згинання (мал.57д);
- деформація кручення (мал.57г);
- деформація зсуву (мал.57в).
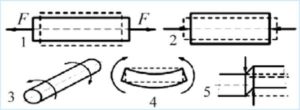
Мал.57. Геометрична суть основних видів механічних деформацій.
В межах програми загальноосвітньої школи, стисло вивчають параметри та закономірності лише однієї різновидності пружної деформації – деформації розтягнення-стиснення. Однак ви маєте знати, що з певними термінологічними поправками, ці параметри і закономірності притаманні будь якій різновидності пружної деформації та для будь якої комбінації цих різновидностей.
Характеризуючи геометричні та силові параметри недеформованого та пружно деформованого тіла, говорять про наступні величини:
– початкова довжина тіла ℓ0 (м);
– абсолютна деформація тіла ∆ℓ= ℓ – ℓ0 (м);
– відносна деформація тіла ε = ∆ℓ/ℓ0 (–);
– деформуюча сила F (Н);
– сила пружності Fпр = –k∆ℓ (Н);
– жорсткість тіла k = F/∆ℓ (Н/м);
– механічна напруга σ = Fпр/S (Н/м2=Па);
– модуль пружності E = σ/ε (Па);
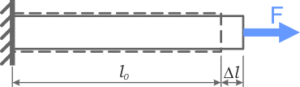
Мал.58. Пружно деформоване тіло та його характеристики.
Абсолютна деформація – це фізична величина, яка характеризує абсолютну деформацію тіла і яка дорівнює різниці між довжиною тіла після деформації (ℓ) та його довжиною до деформації (ℓ0).
Позначається: ∆ℓ
Визначальне рівняння: ∆ℓ=ℓ – ℓ0
Одиниця вимірювання: [∆ℓ] = м.
Відносна деформація – це фізична величина, яка характеризує відносну (порівняльну) деформацію тіла і яка дорівнює відношенню абсолютної деформації тіла Δℓ до його початкової довжиниℓ0.
Позначається: ε
Визначальне рівняння: ε=∆ℓ/ℓ0
Одиниця вимірювання: [ε]= м/м= – , (рази)
Наприклад якщо під дією деформуючої сили, довжина стержня збільшилась від ℓ0=20см до ℓ=21см, то його абсолютна деформація ∆ℓ=ℓ – ℓ0 = 21см – 20см = 1см, а відносна деформація ε=∆ℓ/ℓ0 = 1см/20см = 0,05.
Ту зовнішню силу F, дія якої спричиняє пружну деформацію тіла, називають деформуючою силою. Діюча на тіло деформуюча сила (F), породжує рівну їй за величиною і протилежну за напрямком протидіючу силу, яку називають силою пружності (Fпр).
Сила пружності – це та внутрішня сила, яка виникає в пружно деформованому тілі і яка завжди протидіє появі та зростанню цієї деформації.
Позначається: Fпр
Визначальне рівняння: Fпр = –k∆ℓ, де k – жорсткість тіла; Δℓ – абсолютна деформація тіла; знак «–» вказує на те, що напрям сили пружності протилежний до напрямку деформації Δℓ;
Одиниця вимірювання: [Fпр] =H, ньютон.
Мал.59. Сила пружності завжди протидіє деформуючій силі.
Сила пружності є результуючою тих складних процесів, які відбуваються всередині пружно деформованого тіла. Суть цих процесів полягає в наступному. У відповідності з законами Природи, атоми (молекули) речовини прагнуть до того, щоб бути розташованими на певних, енергетично доцільних відстанях один від одного. Коли ж під дією зовнішніх сил відстані між атомами змінюються (збільшуються або зменшуються), автоматично виникають сили, які прагнуть повернути атоми до попереднього, енергетично доцільного положення. Результуючою цих сил і є сила пружності.
Сила пружності залежить не лише від величини абсолютної деформації тіла (Δℓ), а й від його пружних властивостей. А ці властивості характеризує величина, яка називається жорсткістю тіла (k). Жорсткість тіла – це фізична величина, яка характеризує здатність тіла протидіяти його пружній деформації і яка дорівнює відношенню тієї сили що деформує тіло, до величини отриманої при цьому абсолютної деформації.
Позначається: k
Визначальне рівняння: k=F/∆ℓ
Одиниця вимірювання: [k]=H/м, ньютон на метр.
Потрібно зауважити, що жорсткість тіла, тобто та величина яка визначається за формулою k=F/∆ℓ, фактично не залежить ні від величини деформуючої сили F, ні від величини отриманої при цьому абсолютної деформації ∆ℓ. Жорсткість тіла, залежить від параметрів самого тіла. Зокрема, якщо мова йде про тіла простої геометричної форми (стержні, балки, дроти, тощо), то їх жорсткість залежить від: 1) площі поперечного перерізу тіла S (чим більша площа – тим більша жорсткість); 2) початкової довжини тіла ℓ0 (чим більша довжина – тим менша жорсткість); 3) пружних властивостей того матеріалу, з якого виготовлено тіло. Цю залежність, можна записати у вигляді k=ES/ℓ0, де Е – модуль пружності, величина яка характеризує пружні властивості матеріалу даного тіла і значення якої визначається експериментально та записується у відповідну таблицю.
За необхідності пружні тіла і зокрема пружини об’єднують в певні пружні системи. При цьому розрізняють два базові способи таких об’єднань: паралельне з’єднання (мал.60а); послідовне з’єднання (мал.60б).
а) б)
б)
Мал.60. Розрізняють два базові способи з’єднання пружин (пружних тіл): а) паралельне з’єднання; б) послідовне з’єднання.
Можна довести, що у випадку паралельного з’єднання пружин жорсткістю k1 і k2, їх загальна жорсткість k дорівнюватиме k=k1+k2. Якщо ж аналогічні пружини з’єднані послідовно, то їх загальна жорсткість становитиме k=k1·k2/(k1+k2).
Дійсно:
Задача 1. Визначити загальну жорсткість системи двох пружин, жорсткості яких відповідно дорівнюють k1 і k2, при їх: а) паралельному з’єднанні; б) послідовному з’єднанні.
Дано:
k1
k2
а) kзаг=?
б) kзаг=?
Рішення (а): На основі аналізу паралельного з’єднання пружин (мал.60а), можна стверджувати:
1.При паралельному з’єднанні пружин, величина загальної деформації системи ∆ℓзаг та кожної окремої пружини ∆ℓ1 і ∆ℓ2 є однаковою: ∆ℓзаг = ∆ℓ1 = ∆ℓ2 = ∆ℓ.
2. При паралельному з’єднанні пружин, величина загальної сили пружності системи Fзаг=kзаг∙∆ℓзаг, дорівнює сумі тих сил пружності які виникають в кожній пружині окремо: Fзаг = Fпр1 + Fпр2.
Зважаючи на вище сказане можна записати: kзаг∙∆ℓзаг = k1∙∆ℓ1 + k2∙∆ℓ2, або kзаг∙∆ℓ = k1∙∆ℓ + k2∙∆ℓ = ∆ℓ(k1 + k2), звідси kзаг = k1 + k2.
Рішення (б): На основі аналізу послідовного з’єднання пружин (мал.60б), можна стверджувати:
1. При послідовному з’єднанні пружин, величина загальної деформації системи ∆ℓзаг = Fзаг/kзаг дорівнює сумі деформацій кожної окремої пружини ∆ℓ1 і ∆ℓ2: ∆ℓзаг = ∆ℓ1 + ∆ℓ2.
2. При послідовному з’єднанні пружин, величина загальної сили пружності системи Fзаг, та тих сил пружності які виникають в кожній окремій пружині, є однаковою: Fзаг = Fпр1 = Fпр2 = Fпр.
Зважаючи на вище сказане можна записати: Fзаг/kзаг = Fпр1/k1 + Fпр2/k2, або 1/kзаг = 1/k1 + 1/k2 = (k2+k1)/k1∙k2. Звідси kзаг = k1∙k2/(k1+k2).
Важливою характеристикою пружно деформованого тіла, є величина яка називається механічною напругою. Механічна напруга – це фізична величина, яка характеризує внутрішній механічний стан пружно деформованого тіла і яка дорівнює відношенню виникаючої в тілі сили пружності до величини його площі поперечного перерізу.
Позначається: σ
Визначальне рівняння: σ=Fпр/S
Одиниця вимірювання: [σ]=H/м2=Па, (паскаль).
Основний закон механіки пружно деформованого тіла був експериментально встановлений в 1660 році англійським фізиком Робертом Гуком (1635–1703). В цьому законі (законі Гука) стверджується: при пружних деформаціях тіла, величина його абсолютної деформації (∆ℓ), пропорційна діючій на нього деформуючій силі F. Іншими словами: ∆ℓ=F/k, де k – жорсткість тіла.
а)  б)
б) 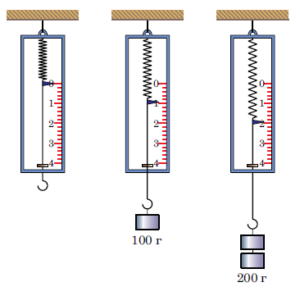
Мал.61. Абсолютна деформація тіла (ΔƖ), прямо пропорційна деформуючій силі (F): ∆ℓ=F/k – закон Гука.
Факт того, що абсолютна деформація тіла пропорційна деформуючій силі, корисно застосовується в приладах які називаються динамометрами (від грец. dynamis – сила та metreo – вимірювати). Динамометр, це прилад який дозволяє вимірювати величину діючої на нього сили. Основним елементом динамометра (мал.61б) є певне пружне тіло (пружина), яке під дією зовнішньої сили певним чином деформується. Власне за величиною цієї деформації і визначають величину деформуючої сили.
До речі, аналізуючи роботу динамометра неважко довести, що жорсткість його пружини (k=F/∆ℓ) не залежить ні від величини деформуючої сили (F), ні від величини отриманої при цьому деформації (∆ℓ). Дійсно, якщо під дією сили 1Н пружина видовжується на 2,5см, під сили 2Н – видовжується на 5,0см, а під дією сили 3Н – на 7,5см, то жорсткість пружини в кожному з випадків дорівнює:
k1 = F1/∆ℓ1 = 1Н/2,5см = 0,4Н/см;
k2 = F2/∆ℓ2 = 2Н/5,0см = 0,4Н/см;
k3 = F3/∆ℓ3 = 3Н/7,5см = 0,4Н/см.
Вище наведене формулювання закону Гука є безумовно правильним, очевидно простим та історично автентичним. Однак в сучасній науці цей закон прийнято формулювати по іншому: при пружних деформаціях тіла, величина виникаючої в ньому механічної напруги σ, пропорційна відносній деформації ε тіла. Іншими словами: σ=Еε, де Е – модуль пружності (модуль Юнга), постійна для даного матеріалу величина, значення якої визначається експериментально і записується у відповідну таблицю.
На перший погляд, формули ∆ℓ=F/k і σ=Еε абсолютно різні. Насправді ж, ці формули математично тотожні. Дійсно. Враховуючи що k=ES/ℓ0; ε=∆ℓ/ℓ0; σ=Fпр/S; Fпр=F, можна записати: ∆ℓ= F/k = Fпр/(ES/ℓ0) = Fпрℓ0/ES = σℓ0/E. Звідси σ=E∆ℓ/ℓ0 = Eε .
Ви можете запитати: «А чому в сучасній науці, закон Гука прийнято записувати не у вигляді ∆ℓ=F/k, а у вигляді σ=Eε?» Пояснюючи такий стан речей, розглянемо декілька простих ситуацій.
Припустимо, що у вашому розпорядженні є два гумових (E1=E2) стержні, однакової площі поперечного перерізу (S1=S2), але різної довжини, скажімо ℓ1=10см, ℓ2=100см (мал.62). Припустимо, що кожен з цих стержнів ви розтягнули (деформували) на одну і ту ж абсолютну величину, наприклад на 10см (∆ℓ1=∆ℓ2=10см). Запитується, чи однаковою є ступінь деформованості цих стержнів? Відповідь очевидна – ні не однаковою. Адже для першого стержня (ℓ1=10см) абсолютна деформація величиною в 10см є відносно великою, тоді як для другого стержня (ℓ2=100см) та ж деформація є відносно малою. Висновок: абсолютна деформація (∆ℓ) не є тією величиною яка у повній мірі об’єктивності характеризує деформованість тіла. В цьому сенсі, більш об’єктивною величиною є відносна деформація (ε=∆ℓ/ℓ0), яка чітко вказує, що ступінь деформованості першого тіла (ε1=1) в десять разів більша за ступінь деформованості другого тіла (ε2=0,1).
Мал.62. Абсолютні деформації тіл однакові (∆ℓ1=∆ℓ2), а ступені їх деформованості – різні.
Тепер уявіть, що два гумових (E1=E2) стержні, однакової довжини(ℓ1=ℓ2) але різної площі поперечного перерізу (скажімо S1=1см2, S2=10см2), навантажені однаковими силами (F1=F2), наприклад по 100Н кожна (мал.63). Запитується, чи є однаковим внутрішній механічний стан пружно деформованого тіла? Відповідь очевидна – ні не є. Адже для першого стержня (S1=1см2), сила в 100Н є відносно великою, тоді як для другого стержня (S2=10см2) – відносно малою. Висновок: виникаюча в тілі сила пружності не є тією величиною, яка у повній мірі об’єктивності, характеризує внутрішній механічний стан пружно деформованого тіла. В цьому сенсі більш об’єктивною величиною є механічна напруга (σ=Fпр/S). Адже механічна напруга чітко вказує на те, що внутрішній механічний стан першого тіла (σ1=100Н/см2) в десять разів більш напружений аніж другого (σ2=10Н/см2).
Мал.63. Сили пружності однакові, а внутрішні механічні стани деформованих тіл – різні.
Не важко бачити, що ті величини які фігурують в першому формулюванні закону Гука (∆ℓ=F/k), є такими, що не у повній мірі об’єктивності характеризують як ступінь деформованості тіла, так і його внутрішній механічний стан. Натомість, ті величини які фігурують в другому формулюванні цього закону (σ=Еε) характеризують ті ж параметри пружно деформованого тіла більш об’єктивно та повно. Додайте до цього факт того, що жорсткість кожного тіла (k=ES/ℓ0) є індивідуальною і такою, що потребує певних експериментальних або теоретичних досліджень, тоді як модуль пружності (E), це певна таблична величина, яка є однаковою для всіх виготовлених із даного матеріалу тіл – і ви зрозумієте чому в сучасній науці та інженерній практиці, закон Гука записують не у вигляді ∆ℓ=F/k, а у вигляді σ=Еε. До речі, той розділ прикладної механіки в основі якого лежить практичне застосування закону Гука (σ=Еε) називають опором матеріалів (сопроматом).
Завершуючи розмову про силу пружності та сили загалом, буде не зайвим сказати декілька слів про чотири сили, які часто плутають одна з одною та застосовують не за призначенням. Ситуація ускладнюється тим, що в багатьох випадках числові значення цих сил є однаковими. Тому, фактично неправильно застосувавши сили, ви можете отримати формально правильну відповідь і заслужено незадовільну оцінку.
Мова йде про силу тяжіння (Fт), вагу (P), реакцію опори (N) та силу пружності (Fпр). Нагадаємо. Сила тяжіння (Fт) – це та сила з якою тіло притягується до Землі. Вага (P) – це та сила з якою тіло діє на опору. Реакція опори (N) – це та сила з якою опора діє на тіло. Сила пружності (Fпр) – це та сила яка виникає в пружно деформованому тілі і яка протидіє його деформації. Із визначень ясно, що коли ми говоримо про ті сили які діють на тіло, то ними є сила тяжіння (Fт) та реакція опори (N). Якщо ж мова йде про ті сили які діють на поверхню опори, то ними є вага тіла (P) та виникаюча в опорі сила пружності (Fпр).

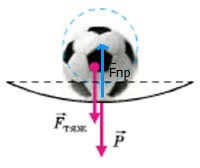
Мал.64. На тіло діє сила тяжіння та реакція опори. На поверхню опори діє вага тіла та виникаюча в опорі сила пружності.
Зважаючи на вище сказане та дотримуючись загально прийнятих визначень, неправильно говорити і писати, що на те тіло яке лежить чи висить на опорі діє вага тіла та виникаюча в опорі сила пружності. Бо на тіло діє сила тяжіння та реакція опори. Неправильно говорити і писати, що на поверхню опори діє сила тяжіння тіла та реакція опори. Бо на поверхню опору діє вага тіла та виникаюча в опорі сила пружності. Неправильно говорити і писати, що тіло падає під дією своєї ваги. Бо тіло падає під дією сили тяжіння.
Задача 2. До двох пружин з’єднаних послідовно, підвісили тягарець. При цьому перша пружина, жорсткість якої 200Н/м видовжилась на 1,6см. Яка жорсткість другої пружини, якщо вона видовжилась на 0,4см? Визначити загальну жорсткість системи даних пружин.
Дано:
k1 = 200Н/м
∆ℓ1 = 1,6см
∆ℓ2 = 0,4см
k2=?; kзаг=?
Рішення: При послідовному з’єднанні пружин, виникаюча в них сила пружності (Fпр=k∙∆ℓ) є однаковою Fпр1 = Fпр2. А це означає, що k1∙∆ℓ1= k2∙∆ℓ2. Звідси випливає, що k2= k1∙∆ℓ1/∆ℓ2 = 200(Н/м)∙1,6(см)/0,4(см) = 800(Н/м).
При послідовному з’єднанні пружин жорсткістю k1 і k2, їх загальна жорсткість визначається за формулою kзаг = k1∙k2/(k1+k2) = 200∙800/(200+800) = 160(Н/м).
Відповідь: k2= 800(Н/м); kзаг = 160(Н/м).
Задача 3. Алюмінієвий циліндр, радіус основи якого 1см, а висота 5см, підвісили до пружини динамометра. При зануренні циліндра в воду, пружина розтягнулась на 1см. Визначити жорсткість пружини.
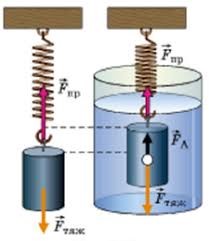
Дано:
R = 1см = 1∙10–2м
h = 5см = 5∙10–2м
∆ℓ= 1см = 1∙10–2м
k = ?
Рішення: За визначенням k=Fпр/∆ℓ, де Fпр=?
Виконуємо малюнок на якому вказуємо всі діючі на тіло сили. А цими силами є: сила тяжіння Fт=mg, де m=ρaV = ρaSh = ρaπR2h, ρa=2,7∙103(кг/м3) – густина алюмінію; сила Архімеда FA=ρвVg = ρвShg = ρвπR2hg, ρв=1,0∙103(кг/м3) – густина води; реакція опори N яка дорівнює виникаючій в пружині силі пружності N=Fпр. Записуємо умову рівноваги тіла відносно осі 0у, яка направлена вертикально вгору:
∑Fy = Fпр + FA – Fт = 0, звідси Fпр = Fт – FA = ρaπR2hg – ρвπR2hg = πR2hg(ρа – ρв) = 3,14∙(1∙10–2)2∙5∙10–2∙9,8∙( 2,7∙103 – 1,0∙103) = 3,14∙5∙9,8∙1,7∙10–3 = 0,26Н. Отже k=Fпр/∆ℓ = 0,26Н/1∙10–2м = 26Н/м.
Відповідь: k = 26Н/м.
Контрольні запитання.
- Яку силу називають деформуючою силою? Чи залежить величина деформуючої сили від властивостей того тіла яке вона деформує?
- Яку силу називають силою пружності? Від чого залежить ця сила?
- Що характеризує жорсткість: властивості тіла чи того матеріалу з якого воно виготовлене?
- Чи означає визначальне рівняння k=F/∆ℓ, що жорсткість тіла залежить від величини тієї сили яка деформує тіло та його абсолютної деформації? Від чого залежить жорсткість тіла?
- Що стверджується в законі Гука?
- Поясніть загальний устрій та принцип дії динамометра.
- Чому в сучасній науці закон Гука прийнято записувати не у вигляді ∆ℓ=F/k, а у вигляді σ=Еε?
- Доведіть що формули ∆ℓ=F/k та σ=Еε є тотожними.
- На поверхні стола лежить тіло масою m. Які сили діють на тіло? Які сили діють на поверхню стола? Чому дорівнює кожна з цих сил?
Вправа №14.
- Відносна деформація дроту 0,001. Визначити абсолютну деформацію цього дроту, якщо його початкова довжина 80см.
- Якої довжини має бути сталевий дріт, щоб при відносній деформації 0,0005 його абсолютна деформація дорівнювала 1см?
-
За заданим графіком залежності довжини пружини від сили, що її розтягує, визначити жорсткість пружини.
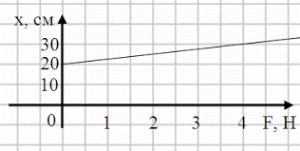
- Жорсткість кожної з двох пружин 50Н/м. Визначте загальну жорсткість системи цих пружин при їх паралельному та послідовному з’єднанні. Зробіть висновки.
- Під дією сили 1кН стержень діаметром 1см подовжився на 1мм. Яка жорсткість цього стержня та виникаюча в ньому механічна напруга?
- До закріпленої одним кінцем дротини діаметром 2мм підвісили вантаж масою 10кг. Визначити виникаючу в дротині силу пружності та механічну напругу.
- Жорсткість дротини k. Чому дорівнюватиме жорсткість половини цієї дротини?
- Яка максимальна механічна напруга виникає в вертикально висячому мідному стержні під дією власної ваги? Як залежить ця напруга від а) діаметру стержня; б) маси стержня; в) довжини стержня?
- На дротині довжиною ℓ висить вантаж масою m. Дротину склали вдвічі і підвісили той же вантаж. Порівняйте абсолютні та відносні деформації дротин в цих двох випадках. Порівняйте їх жорсткості.